
Medições confiáveis são fundamentais para tomarmos decisões corretas. Seja em processos industriais, na pesagem e contabilização de produtos, ou em pesquisas científicas, as informações coletadas por instrumentos de medição são utilizadas para formarmos conclusões e definirmos ações.
Dessa forma, entender o desempenho dos nossos instrumentos e processos de medição é crucial para não sermos induzidos ao erro por medições falhas ou interpretações incorretas do resultado de uma medição.
Na prática, informar apenas o resultado numérico de uma medição não é suficiente. Para que esse resultado possa ser corretamente analisado, comparado e utilizado em decisões técnicas, laboratoriais ou industriais, é necessário também informar a qualidade da medição.
Em outras palavras: é preciso indicar o quanto se pode confiar na medição realizada. Essa indicação quantitativa é a incerteza de medição.
A incerteza de medição é um parâmetro atribuído ao resultado de uma medição que indica o quão confiável é esse resultado.
Ela quantifica os efeitos aleatórios que podem influenciar o resultado da medição e transforma o valor de uma medição em um intervalo de valores dentro do qual o valor real que queremos medir se encontra com determinada probabilidade.
De modo geral, quanto menor a incerteza de medição, maior tende a ser a probabilidade do valor medido estar próximo ao valor verdadeiro, e quanto maior a incerteza de medição, menor tende essa probabilidade.
É importante entender que incerteza de medição não é sinônimo de erro.
O erro é a diferença entre o valor medido e um valor de referência ou valor verdadeiro, quando este é conhecido. Já a incerteza de medição expressa a variabilidade remanescente sobre o resultado da medição, mesmo depois que correções conhecidas tenham sido aplicadas.
Mas como podemos calcular e expressar a incerteza de medição de forma padronizada e internacionalmente aceita? A resposta está no ISO GUM.
O que é o GUM?
O GUM (Guide to Expression of Uncertainty in Measurements), também conhecido como ISO GUM ou Guia para a Expressão de Incerteza de Medição, é uma norma internacional que orienta como quantificar e expressar a incerteza de medição.
O guia foi produzido pela ISO (International Organization for Standardization) em conjunto com outras seis organizações internacionais, incluindo a BIPM (Bureau International des Poids et Mesures) e a OIML (Organização Internacional de Metrologia Legal).
Sua primeira versão foi publicada em 1993 e passou por uma revisão em 2008 (GUM 2008), sendo incluído na parte 3 do documento ISO/IEC Guide 98 com o código ISO/IEC Guide 98-3.
A tradução em português está disponível no site do INMETRO.

Uma das grandes contribuições do GUM foi consolidar uma abordagem unificada para tratar as diferentes fontes de incerteza de medição.
Em vez de separar rigidamente os efeitos entre “erros aleatórios” e “erros sistemáticos” como se fossem categorias independentes de incerteza de medição, o guia propõe que todas as contribuições relevantes sejam convertidas para uma forma comum, normalmente expressa como desvio-padrão.
Isso permite combinar, de maneira coerente, dados provenientes de observações repetidas, certificados de calibração, especificações de fabricantes, resolução de instrumentos, influência ambiental e outras fontes no cálculo da incerteza de medição. O resultado é um método estruturado, rastreável e aplicável a uma enorme variedade de medições.
Este guia é fundamental para profissionais de metrologia, cientistas e engenheiros, pois fornece um método consistente e aceito mundialmente para calcular e expressar a incerteza de suas medições, garantindo que os resultados sejam comparáveis e confiáveis globalmente.
O GUM permite que diferentes organizações e países utilizem uma linguagem comum para expressar a incerteza de medição, facilitando a colaboração internacional e o avanço da ciência e da tecnologia.
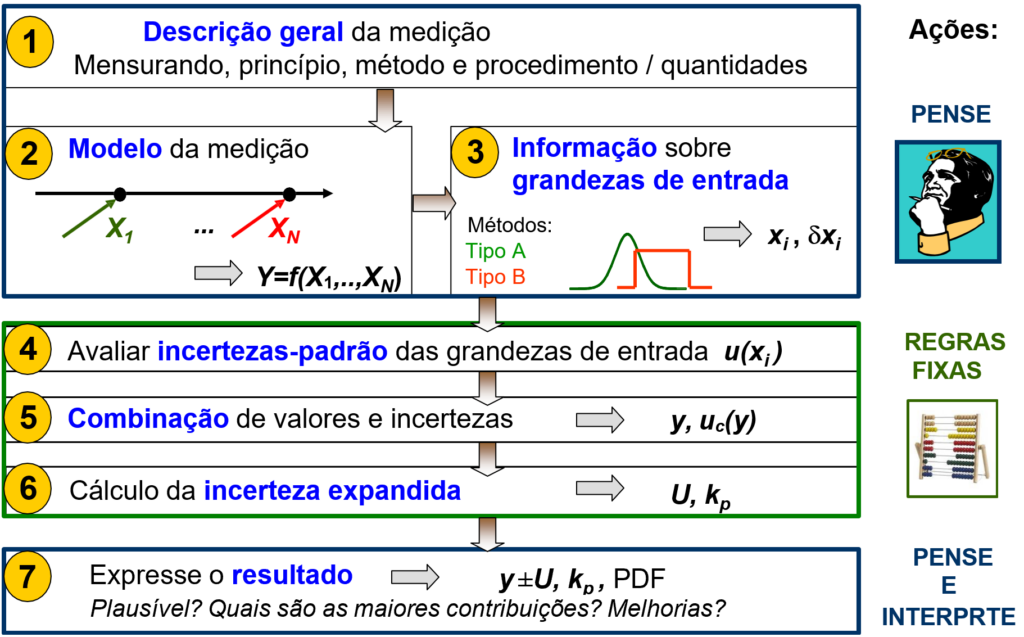
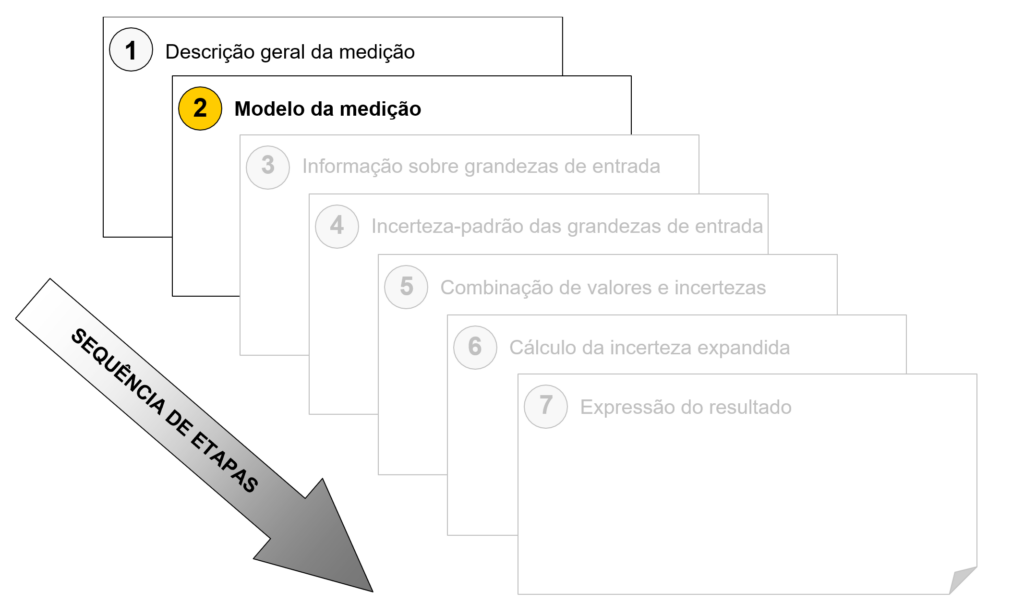
Etapas do cálculo e expressão de incerteza de medição conforme o ISO GUM
O ISO GUM detalha um procedimento com uma sequência de etapas para avaliar e expressar a incerteza de medição.
Este processo envolve definir o que será medido, como será medido, analisar as possíveis fontes de incerteza das medições que serão realizadas, quantificá-las, e então combiná-las para fornecer uma medida compreensiva da incerteza de medição total.
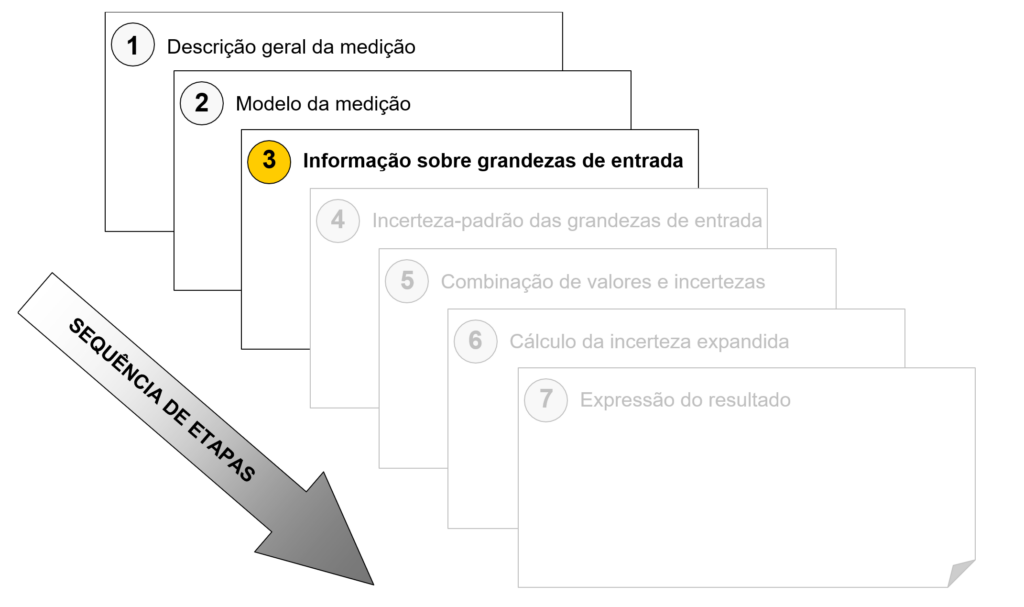
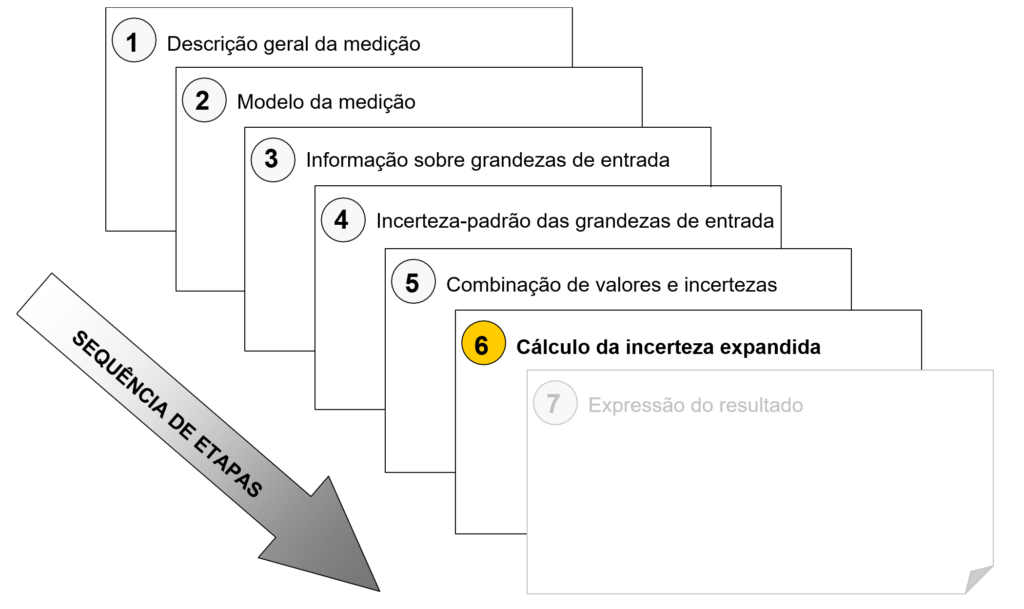
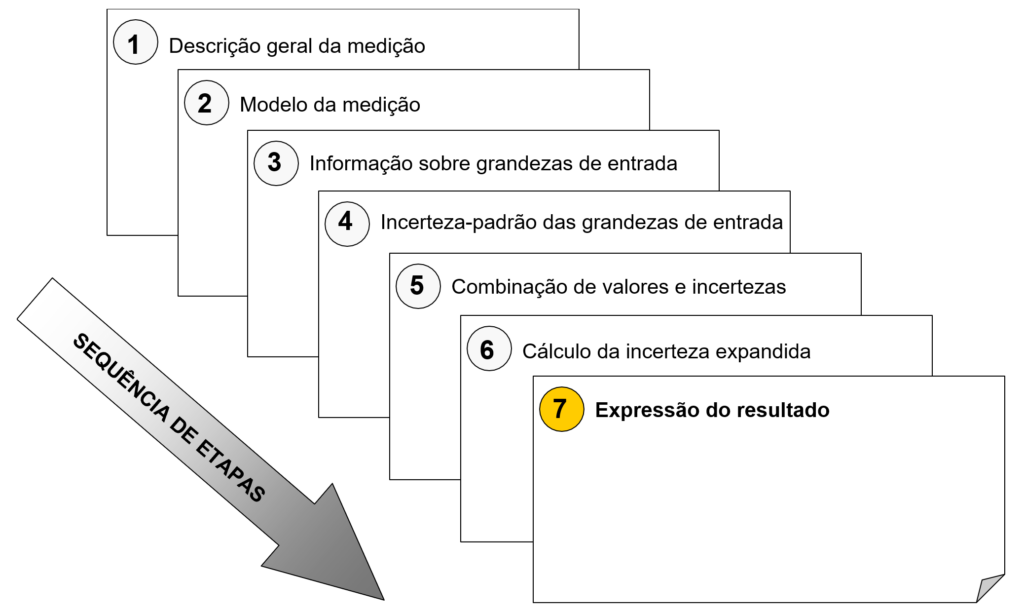
O GUM estrutura esse processo de avaliação e expressão da incerteza de medição em 7 etapas sistemáticas, conforme resumido na tabela abaixo:
| Etapa | Descrição | O que fazer |
|---|---|---|
| Etapa 1 | Descrição geral da medição | Defina o mensurando, o princípio, o método e o procedimento de medição. |
| Etapa 2 | Modelo matemático f(X₁, X₂, …, Xₙ) | Identifique as grandezas de entrada e desenvolva o modelo Y = f(X₁, X₂, …, Xₙ). |
| Etapa 3 | Informações sobre as grandezas de entrada xᵢ | Quantifique cada grandeza de entrada – melhor estimativa e dispersão (incerteza-padrão): Tipo A e Tipo B. |
| Etapa 4 | Incertezas-padrão das grandezas de entrada u(xᵢ) | Converta todas as dispersões em incertezas-padrão u(xᵢ). |
| Etapa 5 | Combinação de valores e incertezas na incerteza de medição combinada uc | Calcule o valor do mensurando y e a incerteza de medição combinada uc(y) usando a lei de propagação de incertezas. |
| Etapa 6 | Cálculo da incerteza de medição expandida U | Multiplique uc(y) pelo fator de abrangência k para obter U = k · uc(y). |
| Etapa 7 | Expressão do resultado Y | Reporte o resultado como Y = y ± U, indicando o fator de abrangência k e o nível de confiança p. |
Em cada etapa, iremos produzir resultados (números ou métodos) que serão usados nas etapas seguintes. Por isso, as etapas devem ser realizadas na sequência especificada.
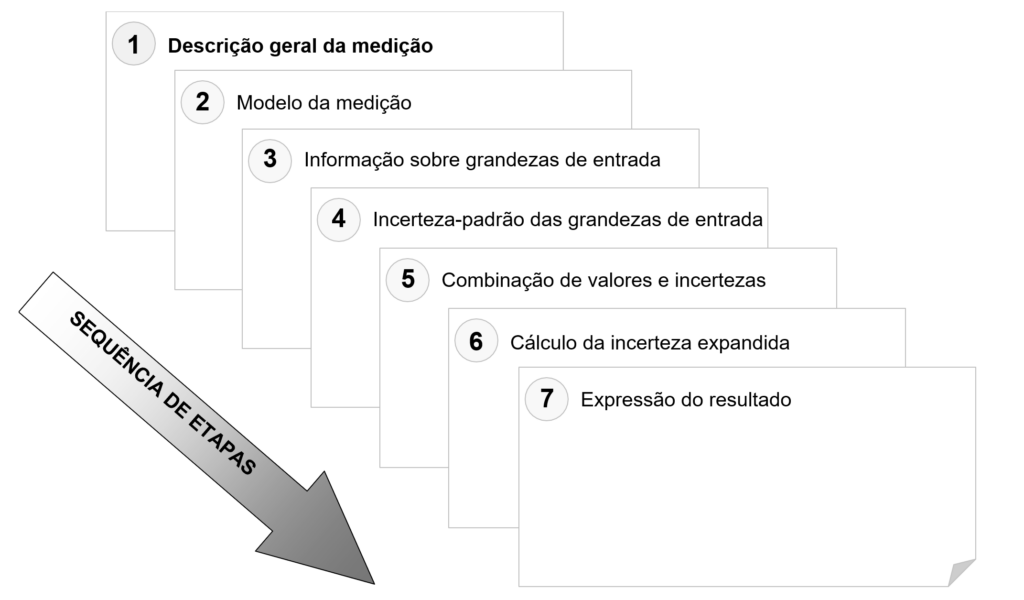
As etapas do processo de cálculo de incerteza de medição podem ser divididas em dois grupos: as que envolvem análise e interpretação, e as que envolvem apenas cálculos e regras pré-determinadas.
As etapas 1 a 3 exigem a análise do processo de medição, como ele será executado e modelado matematicamente. As etapas 4 a 6, por outro lado, seguem regras fixas, cálculos e modelos matemáticos já estabelecidos. Por fim, a etapa final de expressão do resultado e da incerteza de medição requer análise crítica e interpretação.
Nas seções a seguir, iremos explicar cada uma dessas etapas do cálculo da incerteza de medição e ilustraremos cada etapa com um exemplo prático.
Etapa 1: O ponto de partida – definir o mensurando
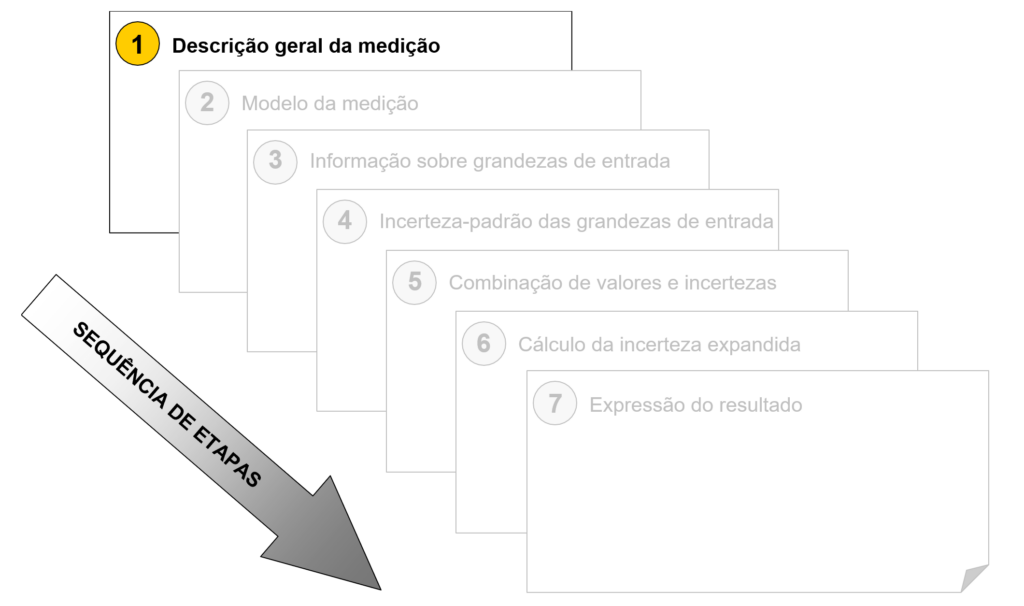
O primeiro passo para avaliar a incerteza de medição corretamente é definir com clareza o mensurando.
O mensurando é a grandeza que se deseja medir. Essa grandeza pode ser, por exemplo, o peso de um material, o volume de um recipiente, a pressão num tubo, ou a temperatura de determinado local ou objeto.
Isso parece simples, mas na prática exige bastante cuidado. O resultado de medição depende não apenas do instrumento utilizado, mas também de condições ambientais, método adotado, correções aplicadas e da própria interpretação do que está sendo medido.
Uma definição ambígua do mensurando compromete todo o restante da avaliação e o cálculo da incerteza de medição.
Por exemplo, medir “o diâmetro de uma peça” pode parecer uma tarefa trivial. Mas qual diâmetro? Em que posição? Utilizando qual instrumento? Sob qual temperatura? Com qual força de medição?
A definição completa do mensurando precisa refletir tudo o que for relevante para o resultado.

Nessa etapa, devemos definir claramente o que será medido e como. As perguntas que devem ser respondidas nessa etapa são:
- o que está sendo medido;
- qual método será utilizado;
- quais instrumentos serão utilizados;
- quais condições ambientais são relevantes;
- quais correções serão aplicadas;
- quantas repetições serão feitas;
- quais fontes de variação podem influenciar o resultado.
Essa etapa é essencial porque define o escopo da avaliação da incerteza de medição. Uma fonte relevante de incerteza de medição que seja esquecida aqui pode comprometer a validade do resultado final.
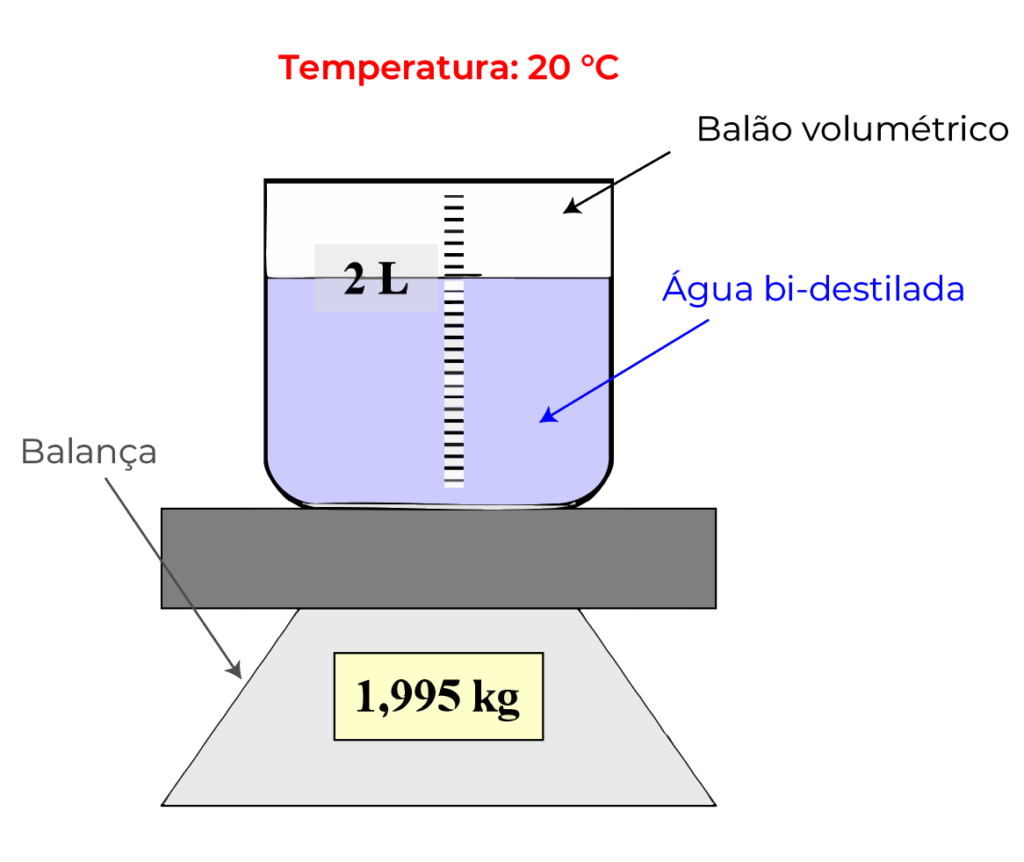
Exemplo – Medição de Volume de Balão Volumétrico
Para ilustrar a aplicação das etapas do GUM para calculara incerteza de medição, utilizaremos o exemplo da calibração de um balão volumétrico de 2 L.
Balão volumétrico de 2000 ml
O objetivo é determinar o volume real do balão por meio de um método gravimétrico — enchendo-o de água, pesando o balão e a água, e dividindo pela densidade da água para chegarmos no volume do balão.
Considerando esse exemplo, a execução da etapa 1 poderia ser feita da seguinte forma:
| Mensurando: Volume do balão volumétrico a 20 °C. Princípio: Volume = Massa / Densidade. Método: Calibração gravimétrica (utilizando massa). Procedimento: O balão é preenchido com água bi-destilada e a massa da água contida é pesada em uma balança calibrada com incerteza de medição conhecida. Serão feitas 5 medidas repetidas. |
Etapa 2: Modelo Matemático
Depois de definir o mensurando, o GUM orienta que a medição seja descrita por um modelo matemático.
O objetivo de uma medição é determinar o valor de um mensurando — isto é, a grandeza que queremos medir. Essa grandeza pode ser, por exemplo, o peso de um material, o volume de um recipiente, a pressão num tubo, ou a temperatura de determinado local. Independente do que seja, atribuímos ao mensurando um símbolo, como por exemplo, Y.
Normalmente, o mensurando Y não é medido diretamente, mas é calculado a partir de outras grandezas , chamadas de grandezas de entrada. A relação entre elas é representada por uma função :
De forma geral, o modelo pode ser escrito como:
GUM Eq. (1): Modelo matemático da medição
onde:
- é o mensurando;
- são as grandezas de entrada;
- é a relação matemática (fórmula) que relaciona essas grandezas e o mensurando.
Em algumas medições, o modelo é simples. Em outras, pode incluir fatores de correção, coeficientes, compensações ambientais e relações não lineares que irão influenciar a incerteza de medição.
Um exemplo clássico é o cálculo do volume de um bloco retangular através da medição de seu comprimento, largura e profundidade:
Nesse caso, o volume é o mensurando, enquanto comprimento , largura e profundidade são as grandezas de entrada. A função que modela o mensurando é a multiplicação de todas as grandezas de entrada, pois no caso de um bloco retangular, o volume é igual ao comprimento vezes a largura vezes a altura do bloco.
Se cada uma das grandezas de entrada tiver uma incerteza de medição, ela será propagada para o resultado final de acordo com a fórmula do mensurando.
Todas as grandezas de entrada — incluindo correções de erros sistemáticos e fatores de correção — que possam contribuir com uma parcela significativa de incerteza de medição ao resultado devem ser incluídas no modelo (GUM 4.1.2).
Nessa etapa, é importante considerarmos as possíveis fontes de incerteza de medição que podem afetar o resultado final e avaliarmos se devemos e se é possível incluí-las no nosso modelo. Algumas fontes de incerteza comuns são:
- Padrão de medição
- Calibração do padrão e a incerteza de medição do padrão
- Deriva do padrão desde a sua última calibração
- Resolução do padrão
- Condições ambiente
- Instabilidade dos parâmetros ambientais e sua influência na medição (temperatura, umidade relativa, pressão atmosférica)
- Incerteza de medição dos parâmetros ambientais
- Conhecimento insuficiente sobre os efeitos dos parâmetros ambientais nas nossas medições
- Vibração, ruído eletromagnético e outros parâmetros difíceis de serem medidos e sua influência
- Habilidade do metrologista / responsável pela medição
- Viés na leitura de instrumentos analógicos (efeito de paralaxe) e sua influência na incerteza de medição
- Habilidade na utilização dos instrumentos de medição
- Limpeza
- Procedimento de medição
- Número de repetições da medição
- Conformidade do procedimento com aquilo que se quer medir
- Definição do mensurando
- Definição incompleta do mensurando e aproximações
- Realização imperfeita da medição
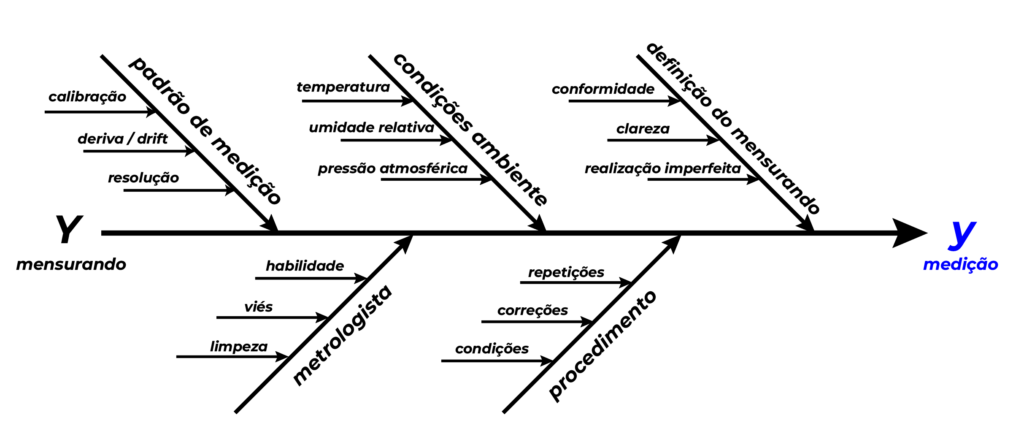
Nessa etapa, podemos utilizar um Diagrama de Ishikawa ou Diagrama de “Espinha de Peixe” para identificar e representar os fatores que influenciam a nossa medição e as fontes de incerteza de medição associadas:
Exemplo – Etapa 2
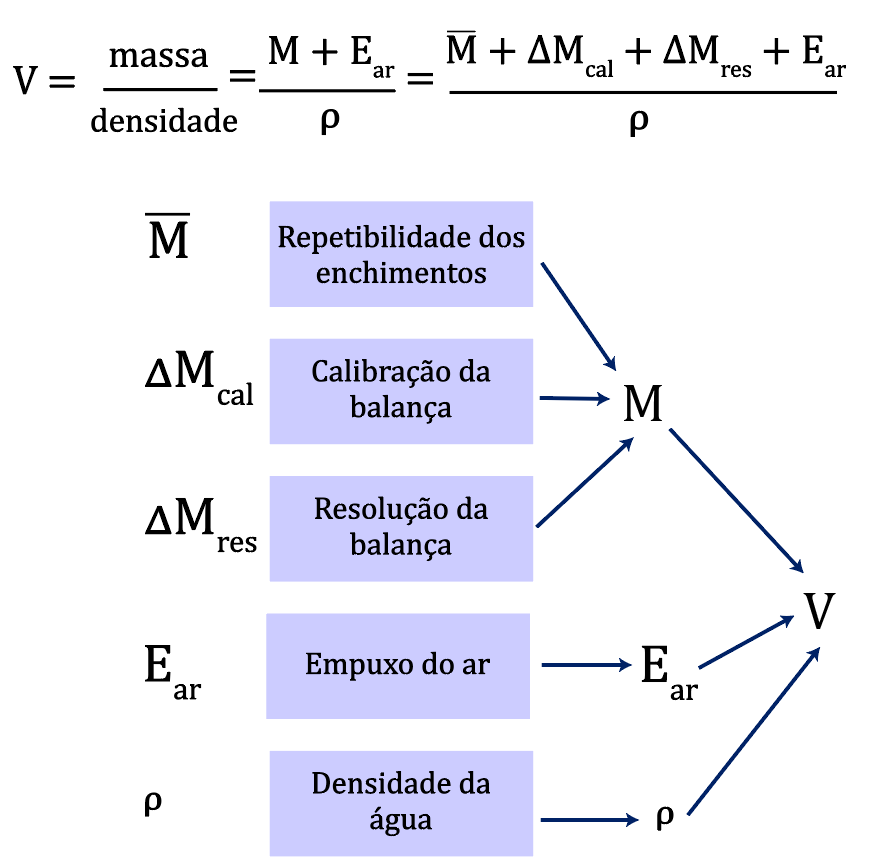
Voltando ao exemplo da medição do volume um balão volumétrico utilizando o método gravimétrico (através da medição de massa), podemos criar um Diagrama de Ishikawa identificando os fatores que influenciam a incerteza de medição:
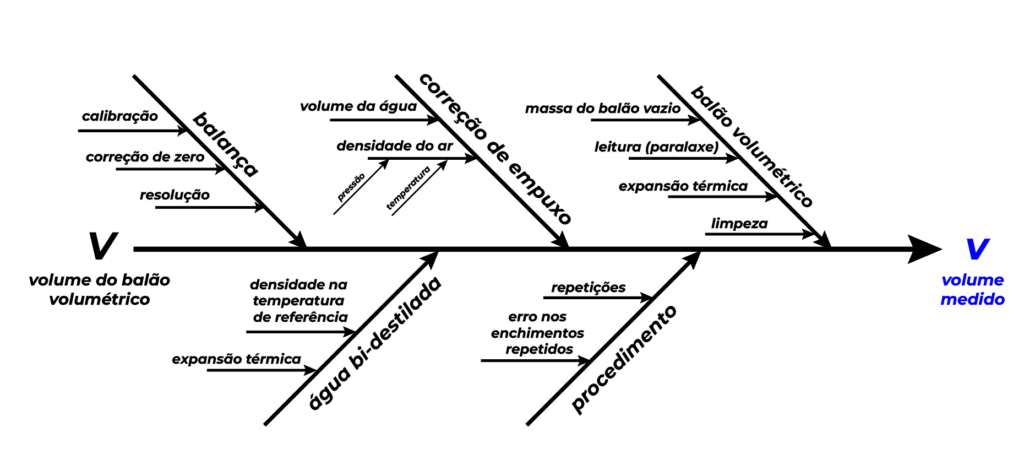
Após identificarmos as grandezas de entrada e seus efeitos, definimos modelo matemático da medição de acordo com a seguinte fórmula:
onde
= média das pesagens do balão utilizando balança de referência
= correção da calibração da balança
= correção da resolução da balança
= correção do empuxo do ar
ρ = densidade da água na temperatura da medição (20 °C)
O valor de é derivado experimentalmente através da pesagem do balão volumétrico preenchido com água até a marca de 2 litros.
Os valores de e são derivados a partir do certificado de calibração e das especificações técnicas da balança padrão que será utilizada para medirmos a massa do balão volumétrico.
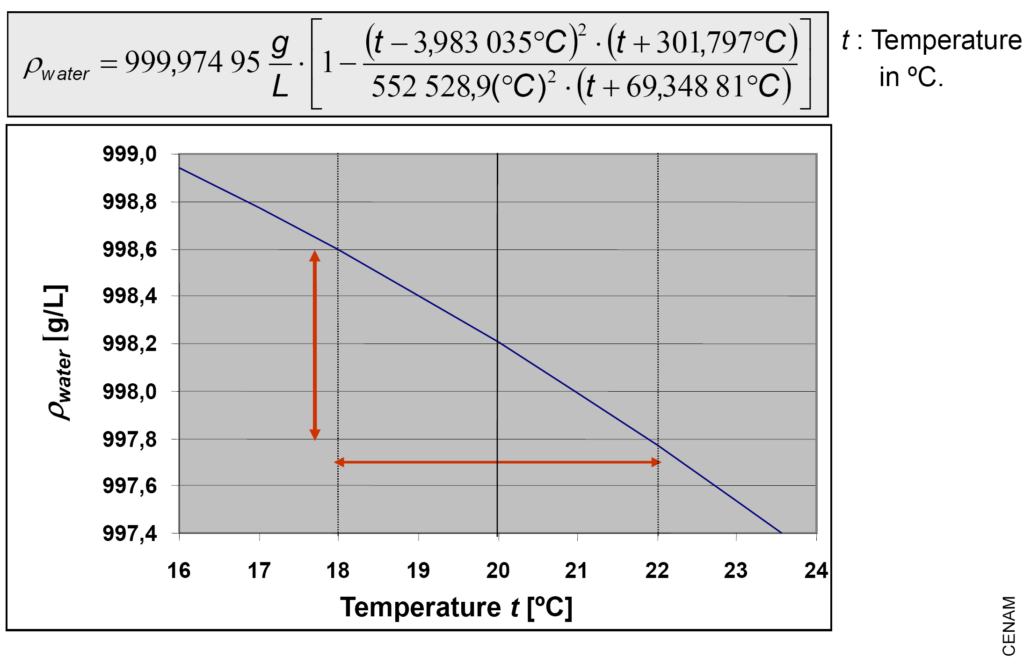
A densidade da água será estimada com base na temperatura ambiente. Para isso, utilizaremos como o método descrito por Tanaka e outros em Metrologia 38 (2001) – páginas 301-309.
A fórmula utilizada, e o gráfico que representa a fórmula na região em torno de 20 graus Celsius é mostrada abaixo:
O empuxo do ar , por sua vez, é a força que o ar aplica a qualquer objeto imerso nele, e que atua contra a força da gravidade. Devemos adicionar esse valor na nossa fórmula da massa, pois o empuxo atua como uma “redução” no peso do objeto (no caso, da água dentro do balão volumétrico), então devemos somá-lo para eliminar seu efeito.
Podemos calcular o valor do empuxo do ar em unidades de massa através da fórmula:
onde é a densidade do ar e é o volume do objeto que está “submerso” em ar.
O valor da densidade do ar , por sua vez, pode ser estimado pela seguinte fórmula, de acordo com o guia EURAMET Calibration Guide 19 (fórmula 4):

onde
= pressão atmosférica em hPa
= umidade relativa em %ur (%rh)
= temperatura ambiente em °C
Etapa 3: Informações sobre as Grandezas de Entrada
Cada grandeza de entrada definida na etapa anterior deve ser associada a uma incerteza-padrão. O GUM distingue dois tipos de avaliação para obter as informações sobre cada grandeza de entrada: a avaliação do Tipo A e a avaliação do Tipo B.
O objetivo da classificação Tipo A e Tipo B é indicar as duas maneiras diferentes de avaliar os componentes de incerteza de medição e serve apenas para facilitar a discussão. A classificação implica não haja qualquer diferença na natureza dos componentes de incerteza de medição advindos de avaliações do Tipo A e do Tipo B.
Ambos os tipos de avaliação são baseados em distribuições de probabilidade, e os componentes de incerteza de medição resultantes de qualquer um dos tipos são quantificados por variâncias ou desvios-padrão.
Avaliação do Tipo A
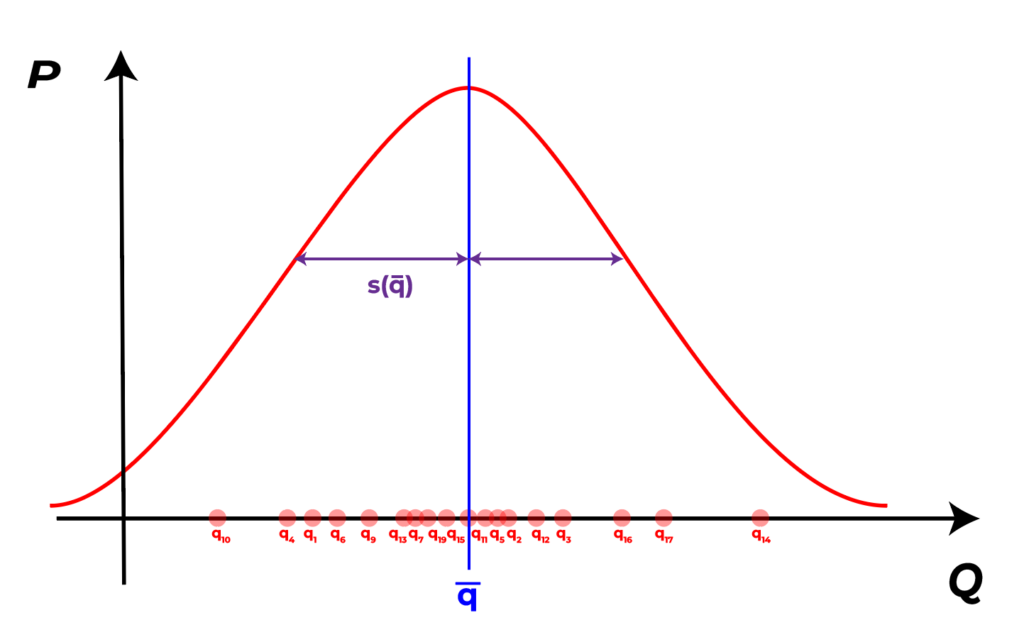
A avaliação do Tipo A é baseada na análise estatística de uma série de observações repetidas.
A melhor estimativa de uma grandeza que segue a avaliação do Tipo A é a média aritmética das observações. Além disso, a incerteza-padrão dessa estimativa é definida como o desvio-padrão experimental (amostral) da média das observações.
Considerando uma grandeza classificado como Tipo A e uma série de medições dessa grandeza realizada sob as mesmas condições, temos que a nossa melhor estimativa de é
GUM Eq. (3): Média de n observações
e a incerteza-padrão dessa estimativa da grandeza é
GUM Eq. (5): Desvio-padrão experimental da média de n observações
onde corresponde ao desvio-padrão experimental (amostral) da variável .
Note que a incerteza-padrão não corresponde ao desvio-padrão amostral das observações, indicado por . A incerteza-padrão é definida pelo desvio-padrão experimental da média das observações, que é calculado através da fórmula:
Algumas observações sobre avaliações do Tipo A:
- A distribuição da média normalmente pode ser considerada gaussiana.
- Ao aumentarmos o número de observações , a incerteza é reduzida aproximadamente na proporção .
- O número de observações deve ser grande o suficiente para que a média seja uma estimativa razoável da grandeza e que seja uma boa estimativa da incerteza-padrão.
Avaliação do Tipo B
A avaliação do Tipo B é baseada em outras fontes de informação, como certificados de calibração, manuais de instrumentos entre outros. Algumas fontes de informação comuns utilizadas nas avaliações do Tipo B são:
- Certificados de calibração de instrumentos de referência.
- Especificações do fabricante de instrumentos de medição.
- Resolução do instrumento de medição.
- Experiência anterior e conhecimento técnico sobre o processo de medição.
Nesses casos, a distribuição de probabilidade da grandeza é assumida com base no conhecimento disponível, e a partir disso determinamos o componente da incerteza de medição.
Algumas das distribuições mais utilizadas nas avaliações de Tipo B são descritas a seguir.
Distribuição Retangular ou Uniforme
Em uma distribuição retangular (também conhecida como uniforme), consideramos que a variável pode ser encontrada entre dois valores e com igual probabilidade dentro desse intervalo.
Ou seja, sabemos (ou presumimos) que que a variável está dentro do intervalo entre e , porém não temos informações adicionais sobre a variável, por isso devemos considerar qualquer valor dentro do intervalo é igualmente provável de ser o valor da variável.
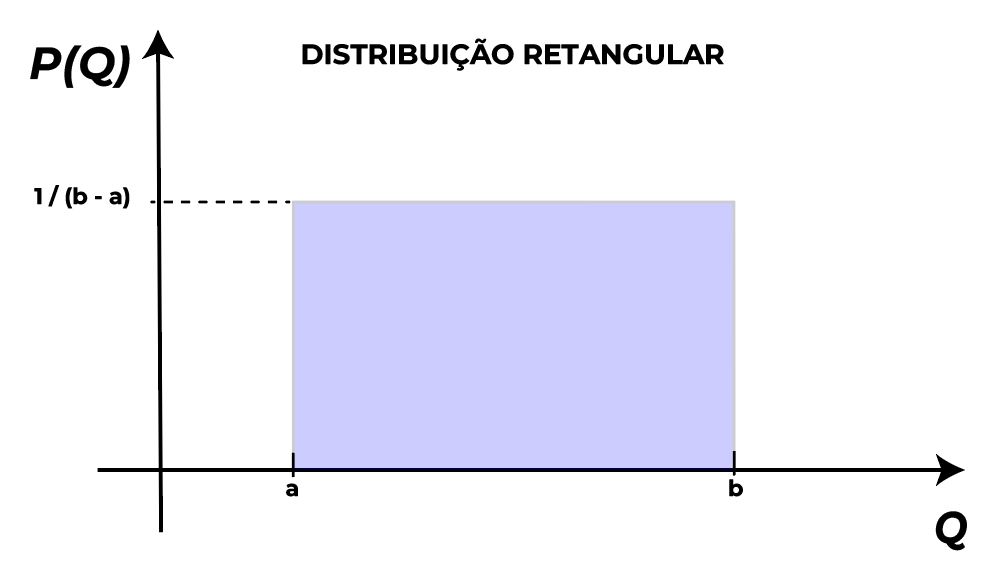
Por não fazer muitas suposições sobre a distribuição da variável, a distribuição retangular é considerada uma estimativa conservadora na maior parte dos casos.
A média da distribuição uniforme é e o seu desvio padrão é .
Um exemplo do uso da distribuição retangular é na estimativa da incerteza de medição em decorrência da resolução de instrumento digital. Como um instrumento digital possui uma resolução máxima, não podemos afirmar que o valor indicado em sua tela ou interface de usuário é o valor realmente medido.
Nesse caso, podemos estimar que o valor realmente medido está distribuído de forma uniforme entre e , onde é o valor indicado pelo instrumento e é a resolução do instrumento.
Vamos considerar o exemplo de um voltímetro com resolução de 0,1 volt.
Se ligarmos o voltímetro a uma fonte de tensão e o equipamento indicar 16,0 V em sua tela, não podemos afirmar que o equipamento realmente mediu exatamente 16 volts.
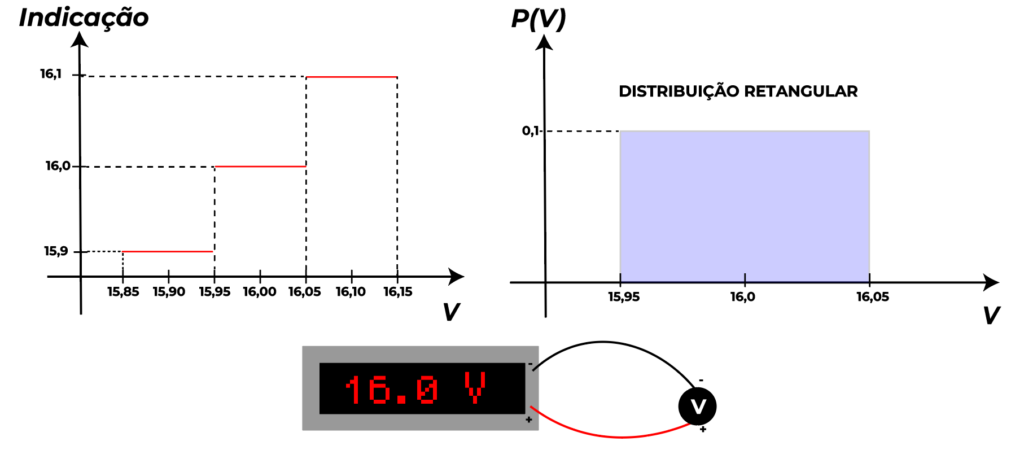
No entanto, conforme ilustrado na figura acima, sabemos que para que o equipamento indicasse 16,1 V ou 15,9 V, seria necessário que o equipamento medisse uma tensão acima de 16,05 V ou abaixo de 15,95 V.
Portanto, podemos considerar que o valor da medição do instrumento segue uma distribuição uniforme entre 15,95 V e 16,05 V.
Outros exemplos do uso da distribuição retangular são:
- Distribuição de uma medição considerando o erro máximo especificado pelo fabricante de um instrumento como os limites em torno do valor medido.
- Distribuição de parâmetros ambientais (estimativa conservadora).
- Na estimativa da incerteza de medição devido a histerese.
- Na verificação de um equipamento na área de metrologia legal.
- Estimativa conservadora de um parâmetro geral.
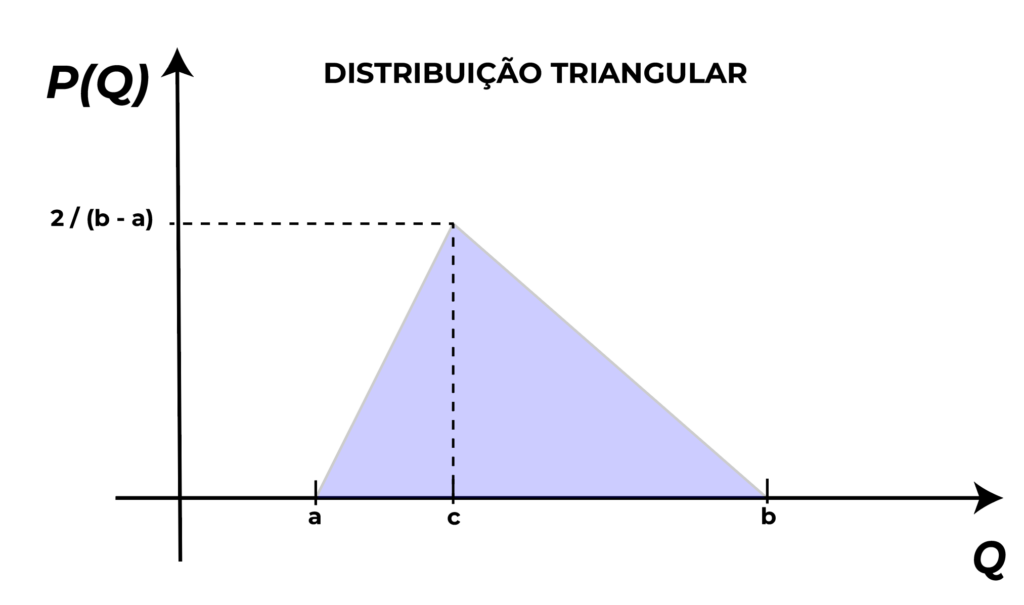
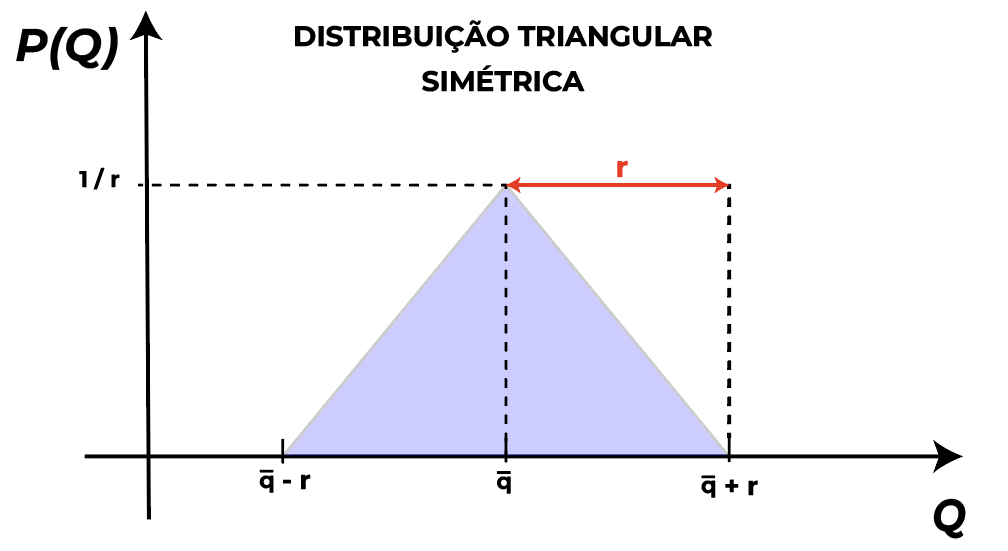
Distribuição Triangular
A distribuição triangular é similar à distribuição retangular pois o valor da variável também é limitado entre dois valores e .
No entanto, ao contrário da distribuição retangular, a variável não tem igual probabilidade de ter qualquer valor dentro desse intervalo, mas possui um valor entre e que é o mais provável. A probabilidade da variável tomar outros valores cai linearmente a partir de , até chegar a 0 nos limites do intervalo:
Em metrologia, normalmente utilizamos uma distribuição triangular simétrica, na qual o ponto está na metade do intervalo entre os pontos e . Ou seja, .
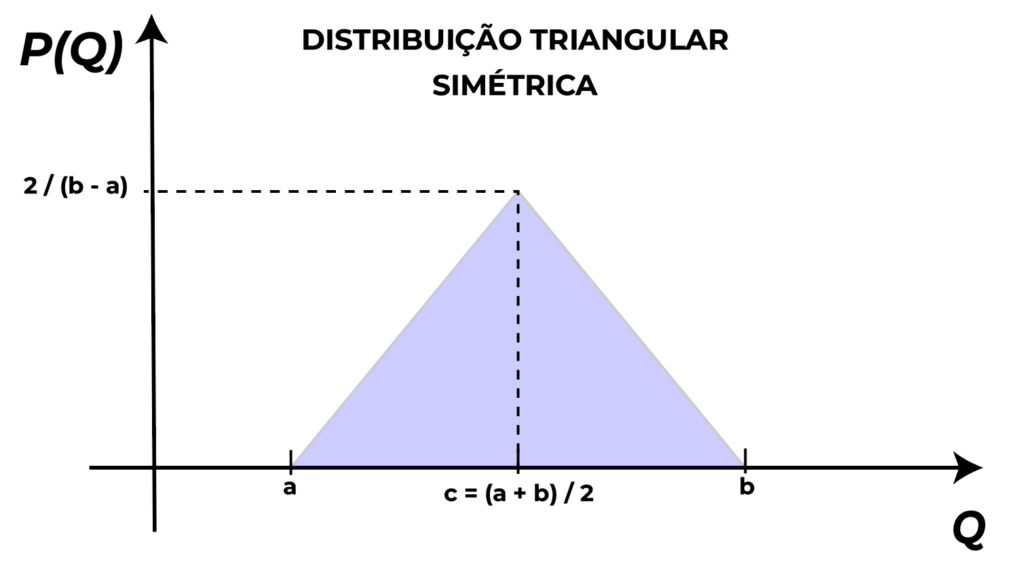
No caso da distribuição triangular simétrica, é fácil deduzirmos que a média da distribuição é o ponto .
O desvio padrão da distribuição triangular simétrica é , que é menor do que o desvio-padrão de uma distribuição uniforme com os mesmos limites por um fator de . Isso confirma nossa intuição de a distribuição triangular é menos “dispersa” do que a distribuição uniforme, e portanto, a distribuição uniforme é mais conservadora na estimativa da incerteza de medição.
Outra forma de descrevermos uma distribuição triangular simétrica é a partir da sua média e do “raio” do intervalo, também conhecido como semi-intervalo ou semi-amplitude. Nesse caso, temos que
.
De um modo geral, utilizamos a distribuição triangular em situações em que sabemos ou presumimos que o valor estimado está dentro de um intervalo, porém há motivos para acreditarmos que valores mais próximos do ponto central do intervalo são mais prováveis, enquanto os valores mais próximos dos extremos do intervalo são menos prováveis.
Isso implicará em uma incerteza de medição menor do que usarmos uma distribuição uniforme.
Por exemplo, suponha que temos uma referência de tensão que gera aproximadamente 16 V. Se nosso voltímetro possui resolução de 0,1 V e mede a tensão de 16,0 V, podemos presumir que o valor mais provável realmente medido pelo voltímetro é 16,0 V.
Porém, sabemos que por conta da resolução do equipamento, há probabilidade de que o equipamento tenha medido valores entre 15,95 V e 16,05 V.
Como o valor mais provável é 16,0 V pelo fato de sabermos que esse é o valor da referência, podemos utilizar uma distribuição triangular simétrica centrada em 16,0 V e com extremos em 15,95 V e 16,05 V.
Alguns exemplos do uso da distribuição triangular são:
- Estimativa da incerteza de medição devido à resolução do equipamento quando o valor da medição é fixado por uma referência externa.
- Distribuição de parâmetros ambientais controlados em valores específicos.
- Quando o valor da medição foi obtido por um julgamento técnico, e a estimativa central é a mais provável, porém existe um intervalo de possibilidades.
Distribuição Normal (Gaussiana)
A distribuição normal (também conhecida como distribuição gaussiana) é amplamente utilizada para modelar fenômenos naturais.
Numa distribuição normal, os valores da variável podem tomar qualquer valor, porém quanto mais próximos de um determinado valor , maior é a sua probabilidade.
O valor corresponde à média ou expectativa matemática da variável. A distribuição normal é simétrica em relação a esse valor: a probabilidade da variável tomar um valor é proporcional apenas à distância entre o valor e à média .
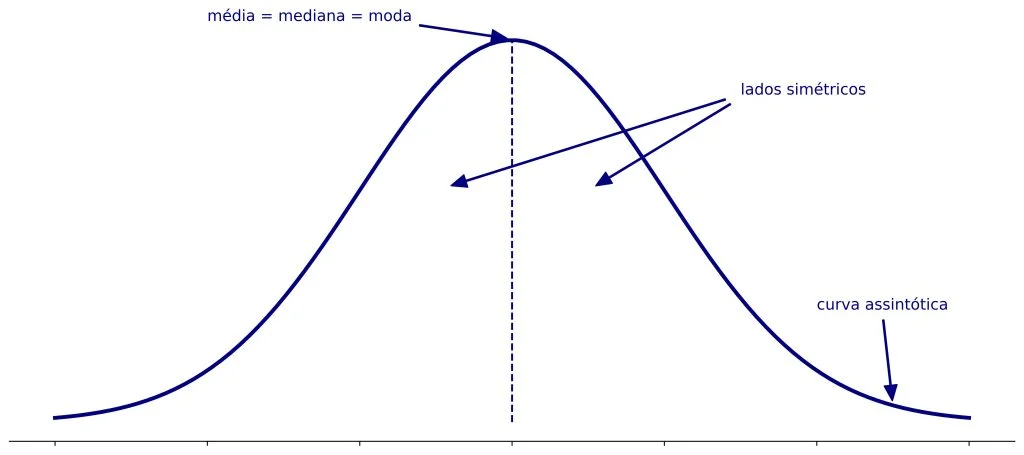
Além do valor (média), uma distribuição normal é caracterizada pelo valor , que corresponde ao desvio-padrão da distribuição. Quanto maior o valor de , maior a “dispersão” da distribuição, ou seja, maior a probabilidade da variável tomar valores distantes da média .
Independente do valor de e , uma propriedade de todas as distribuições normais é que há cerca de 68,27% de probabilidade da variável caracterizada pela distribuição normal estar dentro do intervalo e . Ou seja, há 68,27% de chance da variável estar a uma distância de no máximo 1 desvio-padrão da média.
Se considerarmos 2 desvios-padrão, essa probabilidade sobe para aproximadamente 95,45%. Para 3 desvios-padrão, a chance da variável estar dentro do intervalo é aumenta para aproximadamente 99,73%.
Quando maior a distância do valor para o valor central da distribuição (a média), menor a sua probabilidade, mas é importante notar que em uma distribuição normal, a probabilidade nunca chega a 0.
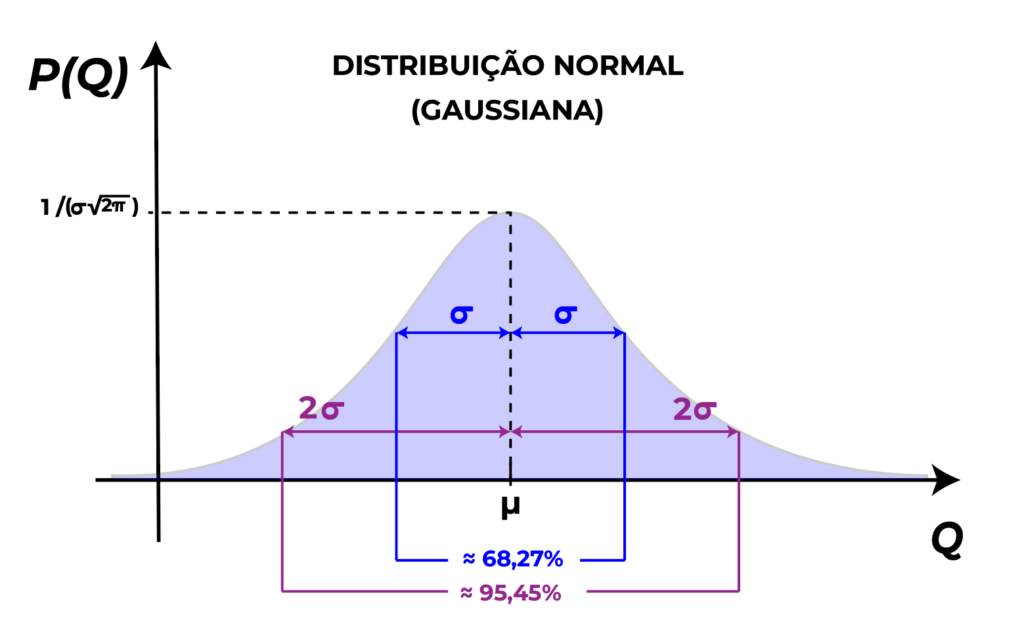
Uma distribuição normal com média e desvio padrão é descrita pela função de probabilidade
.
A distribuição normal surge naturalmente quando combinamos diferentes variáveis aleatórias (por exemplo, fontes de incerteza de medição), independentemente da distribuição dessas variáveis.
Pelo Teorema Central do Limite, quando realizamos a amostragem de uma variável aleatória com média e desvio-padrão , à medida que o número de amostras aumenta, a distribuição da média (ou da soma) das amostras tende a aproximar uma distribuição normal com média e desvio-padrão , onde é o número de amostras.
A imagem abaixo ilustra a evolução da distribuição da soma dos resultados de lances de um dado à medida que aumentamos o número de lances. É possível observar que a partir de 4 lances, a distribuição toma a aparência similar a um sino que é característica de uma distribuição normal.
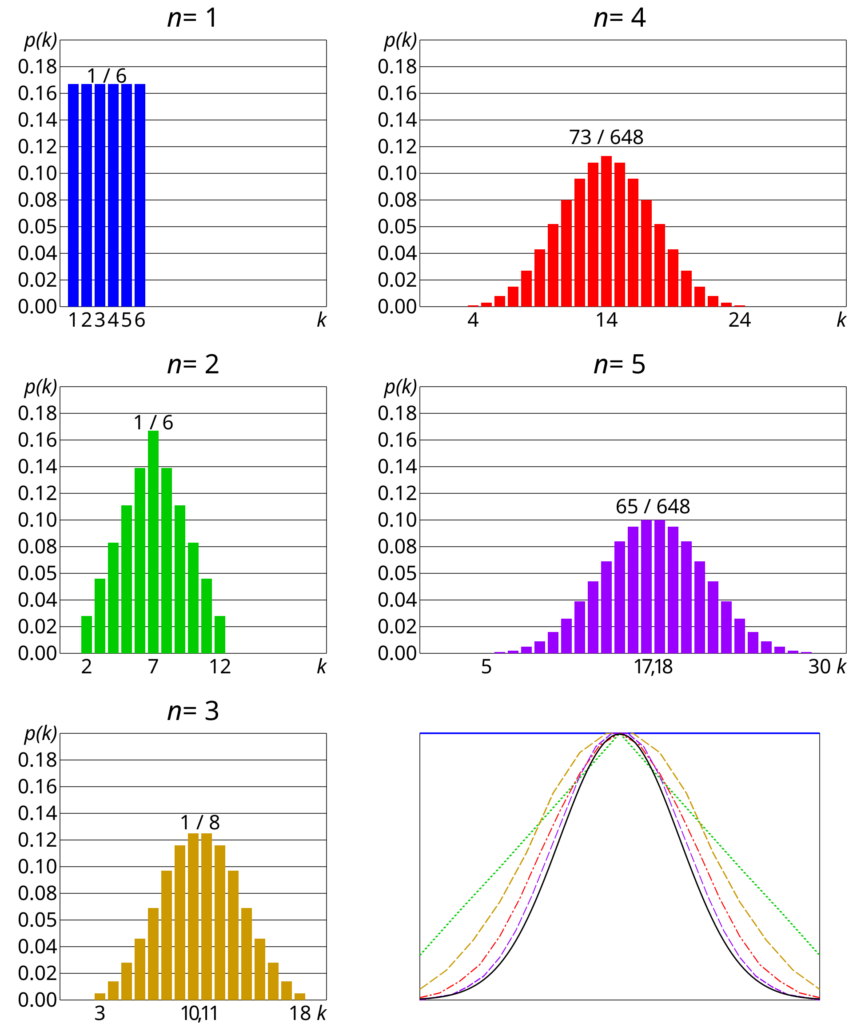
Isso não depende do tipo da distribuição original. Desde que a distribuição original possua uma média definida e desvio-padrão finito, conforme aumentamos o número de amostras, a distribuição da média de amostras irá se aproximar a distribuição normal.
Além disso, quando combinamos amostras diferentes variáveis, cada uma com diferentes distribuições, o Teorema Central do Limite também diz que a média dessas amostras combinadas irá aproximar uma distribuição normal conforme aumentamos o número de amostras (desde que cada distribuição possua média é desvio-padrão definidos e finitos).
A distribuição normal é apropriada quando a própria informação disponível já sugere comportamento gaussiano, com uma estimativa originada de um grande número de observações com um desvio-padrão conhecido.
Exemplos de uso da distribuição normal são:
- Para modelar a distribuição de uma estimativa que resulta da combinação de diversas variáveis independentes que foram amostradas um grande número de vezes.
- O desvio-padrão real da distribuição é conhecido externamente, e não derivado das amostras.
Valor z ou “escore”-z
O valor z é uma medida estatística que indica quantos desvios-padrão um valor está acima ou abaixo da média.
A fórmula é:
onde:
- é o valor observado
- é a média
- é o desvio-padrão
O valor z pode ser calculado para amostras de qualquer tipo distribuição (retangular, triangular, normal ou outras), porém ele tem significância especial quando lidamos com distribuições normais.
Em distribuições normais, o valor z “transforma” uma amostra em uma amostra de uma distribuição normal padrão (isto é, uma distribuição normal com média 0 e desvio-padrão 1).
Isso permite compararmos amostras de distribuições normais diferentes e entendermos o quão perto de sua média (quão estatisticamente prováveis) essas amostras são.
Mas e se nossa amostra não vem de uma distribuição normal?
Nesse caso, devemos lembrar que o Teorema Central do Limite diz que se realizarmos várias amostras de uma variável com média e desvio-padrão , então a média dessas amostras tende a aproximar uma distribuição normal com média e desvio padrão conforme aumentamos o número de amostras .
Ou seja, a partir de qualquer variável aleatória com média e desvio-padrão , podemos transformar essa variável em uma distribuição aproximadamente normal com média e desvio-padrão realizando amostras de e calculando a sua média.
Em seguida, podemos transformar essa variável em outra variável com distribuição (aproximadamente) normal padrão através da seguinte fórmula:
O valor z é simplesmente uma amostra dessa variável normal , que possui média 0 e desvio-padrão igual a 1. O processo de transformação da variável na variável é conhecido em estatística como normalização para a pontuação padrão.
Utilizando o valor z, podemos responder perguntas como:
- quão longe um valor está da média;
- qual a probabilidade de ocorrer um valor menor ou maior que ele;
- qual valor corresponde a certa probabilidade.
Exemplos:
- : o valor está exatamente na média;
- : o valor está 1 desvio-padrão acima da média;
- : o valor está 2 desvios-padrão abaixo da média
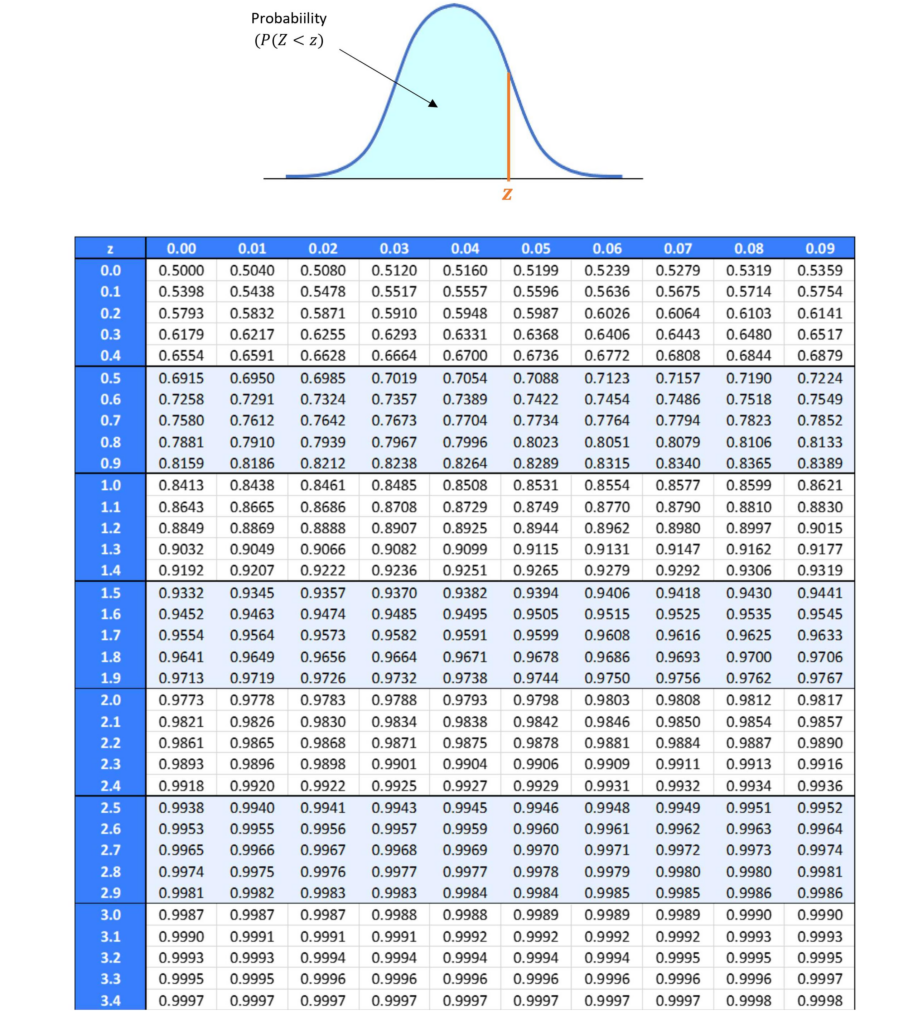
A tabela z é uma tabela das probabilidades cumulativas da distribuição normal padrão, isto é, a distribuição normal com:
- média
- desvio-padrão
Depois de converter um valor de uma amostra em , você usa a tabela para encontrar a probabilidade associada.
Na maioria dos casos, a tabela fornece o valor de , ou seja, a probabilidade de que o valor amostrado é menor que (a probabilidade acumulada à esquerda de ).
1. Probabilidade de estar abaixo de um valor
Se você quer calcular:
basta procurar o número na tabela.
Para encontrar um o valor de na tabela, primeiro encontramos a fileira na qual os dois primeiros dígitos significantes são mostrados na primeira coluna à esquerda. Em seguida buscamos a coluna correspondente ao terceiro dígito na primeira linha. O valor estará na linha e coluna encontrados.
Por exemplo, para o valor de z igual à 1,96, primeiro encontramos o valor 1,9 na vigésima fileira da primeira inicial (não contando a fileira do topo). Em seguida verificamos o valor indicado como 0,06 ou 6 está na sétima coluna da primeira fileira (não contando a primeira coluna à esquerda). O valor de estará na célula correspondente à vigésima fileira e sétima coluna da tabela.
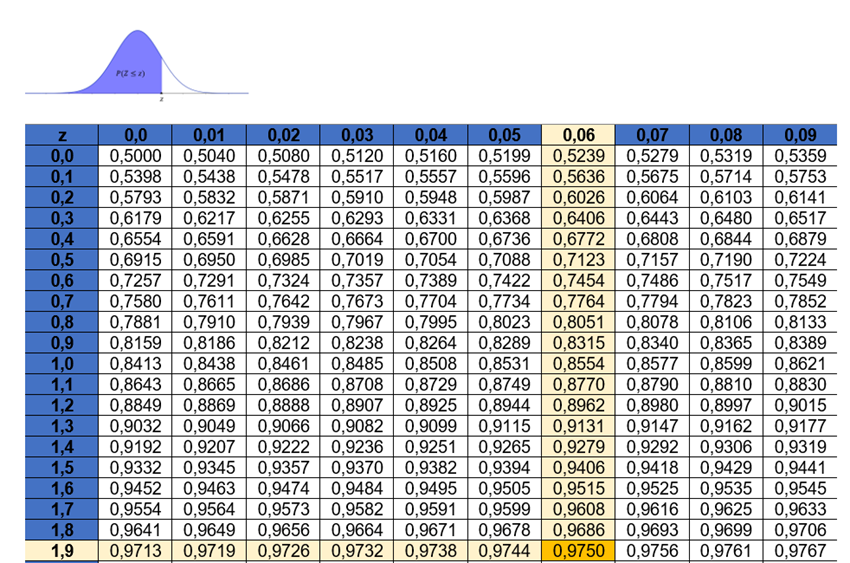
Olhando a célula da tabela correspondendo à coluna e fileira dos dígitos, temos:
Para o valor z = 1,23 podemos verificar igualmente que
2. Probabilidade de estar acima de um valor
Se você quer:
considere que:
Logo:
Quando consideramos a probabilidade , o valor dessa probabilidade é chamado de nível de significância, e o valor que gera esse nível de significância é chamado de valor crítico do nível de significância .
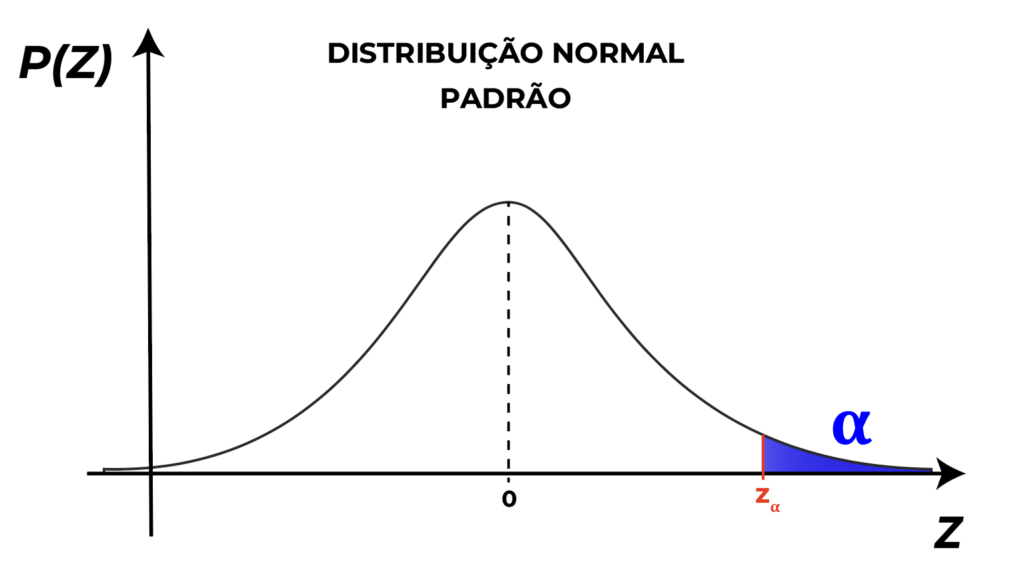
Por exemplo, para o nível de significância , temos que
Outros valores críticos para determinados nível de significância são:
Quanto mais próximo de 0 é o nível de significância , maior é o valor do nível crítico .
3. Probabilidade entre dois valores
Se você quer calcular:
isso é equivalente à calcular:
Consultando a tabela:
Então:
4. Valor z negativo
Se z é negativo:
muitas tabelas já trazem esse valor diretamente. Se não trouxerem, use a simetria da curva normal:
Como vimos anteriormente,
então
Como:
temos:
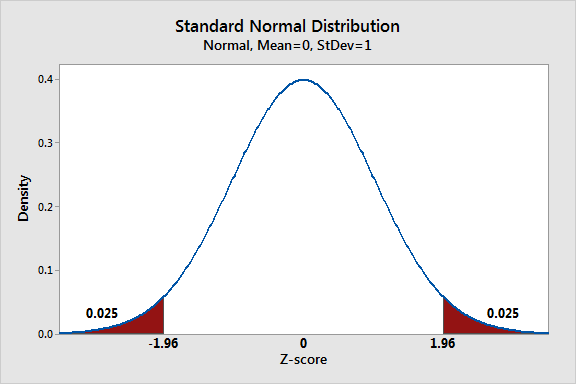
5. Probabilidade do valor estar dentro de certa distância da média (nível de confiança)
Se queremos saber a probabilidade do valor estar dentro a uma certa distância da média, precisamos calcular
onde z é a distância medida em desvios-padrão.
Como mostrado anteriormente, podemos deduzir que:
Utilizando z =1 e z =2, podemos verificar que
Isso confirma nossas observações anteriores de que em distribuições normais, há aproximadamente 68% de chance dos valores amostrados estarem até 1 desvio-padrão da média, e por volta de 95% de chance de estarem até 2 desvios-padrão da média.
Lembrando da explicação sobre níveis de significância anteriormente, podemos observar que
Ou seja,
Quando consideramos uma probabilidade do tipo , onde é um número positivo, o valor dessa probabilidade é conhecido como nível de confiança ou probabilidade de abrangência, e o valor que gera essa probabilidade é o valor crítico .
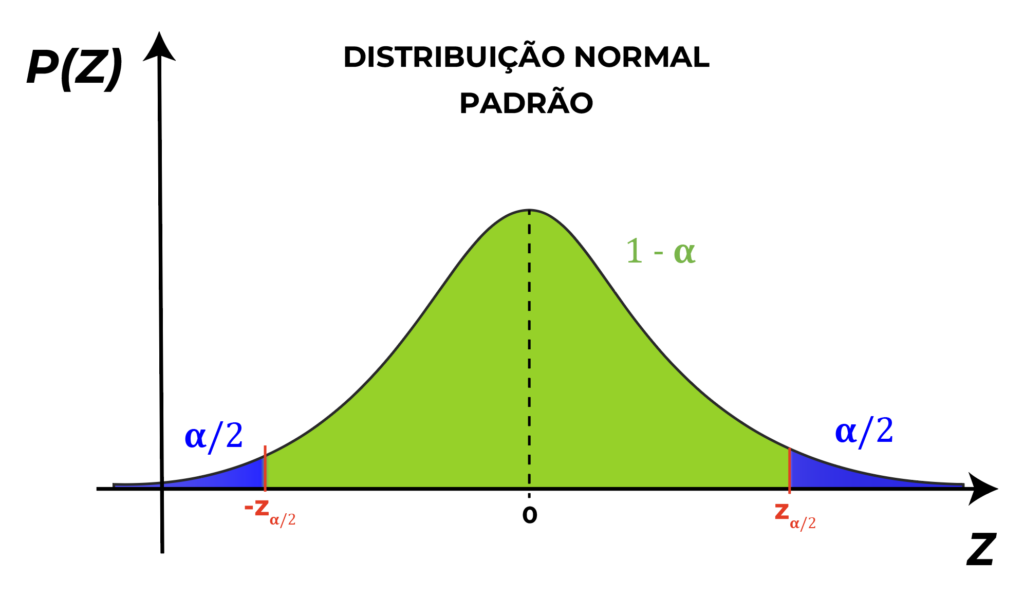
O intervalo de confiança (IC) correspondente ao nível de confiança é simplesmente o intervalo entre e , frequentemente abreviado como .
Por exemplo, para o nível de confiança de 95% temos que , e, portanto, o valor crítico associado a esse nível de confiança é e o intervalo de confiança é .
Outros exemplos são:
Nível de confiança de 50%:
Nível de confiança de 68%:
Nível de confiança de 95%:
Nível de confiança de 99%:
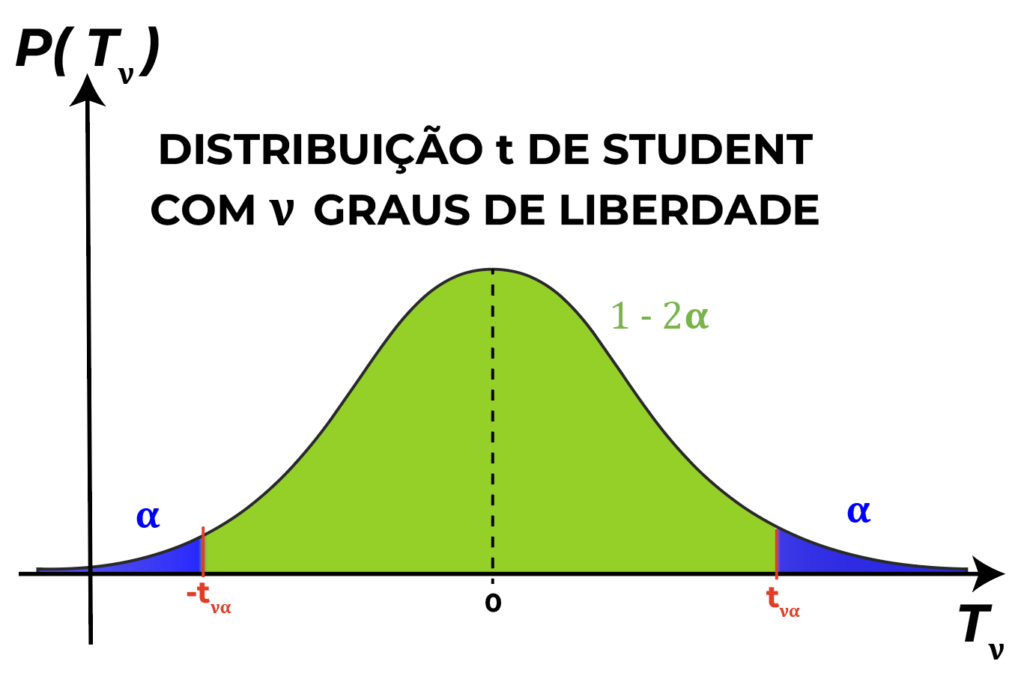
Distribuição t de Student (t-Student)
A distribuição t-Student é usada para descrever a incerteza de medição associada a uma média estimada a partir de uma amostra finita, especialmente quando o desvio-padrão populacional não é conhecido e precisa ser estimado pelos próprios dados.
A distribuição t-Student é uma generalização da distribuição normal padrão.
Conforme discutimos na seção anterior, podemos transformar uma variável aleatória com média e desvio-padrão em uma variável com distribuição normal padrão através da seguinte fórmula:
onde é obtida através da média de observações (amostras) de .
Normalmente, queremos utilizar para estimar a média da variável , e o valor do desvio-padrão é desconhecido. No entanto, utilizamos na fórmula para obter , o que na prática não é possível.
A distribuição t-Student surge quando substituímos o desvio-padrão pelo desvio padrão experimental ou amostral :
Distribuição t de Student (t-Student) com n-1 graus de liberdade
Diferentemente da distribuição normal padrão, a distribuição t-Student não é unica, mas é parametrizada por um número chamado de graus de liberdade, representado pelo símbolo .
No caso do exemplo acima, o valor de corresponde ao número de amostras menos 1. De modo geral, a distribuição t-Student com graus de liberdade é utilizada para descrever distribuições obtidas a partir da seguinte fórmula.
O número de graus de liberdade indica a quantidade efetiva de informação independente que temos para estimar a dispersão de uma variável.
A ideia central é esta: quando medimos uma grandeza várias vezes, os dados brutos contêm informação sobre:
- a posição central da amostra, isto é, a média;
- a dispersão da amostra, isto é, o desvio-padrão experimental.
Mas, no momento em que calculamos a média das amostras, isso impõe uma restrição aos dados. Se temos observações e a média já foi calculada, apenas delas podem variar independentemente; a última fica “presa” para que a soma total seja consistente com a média calculada.
É por isso que no caso da variável obtida a partir da média de amostras, temos que
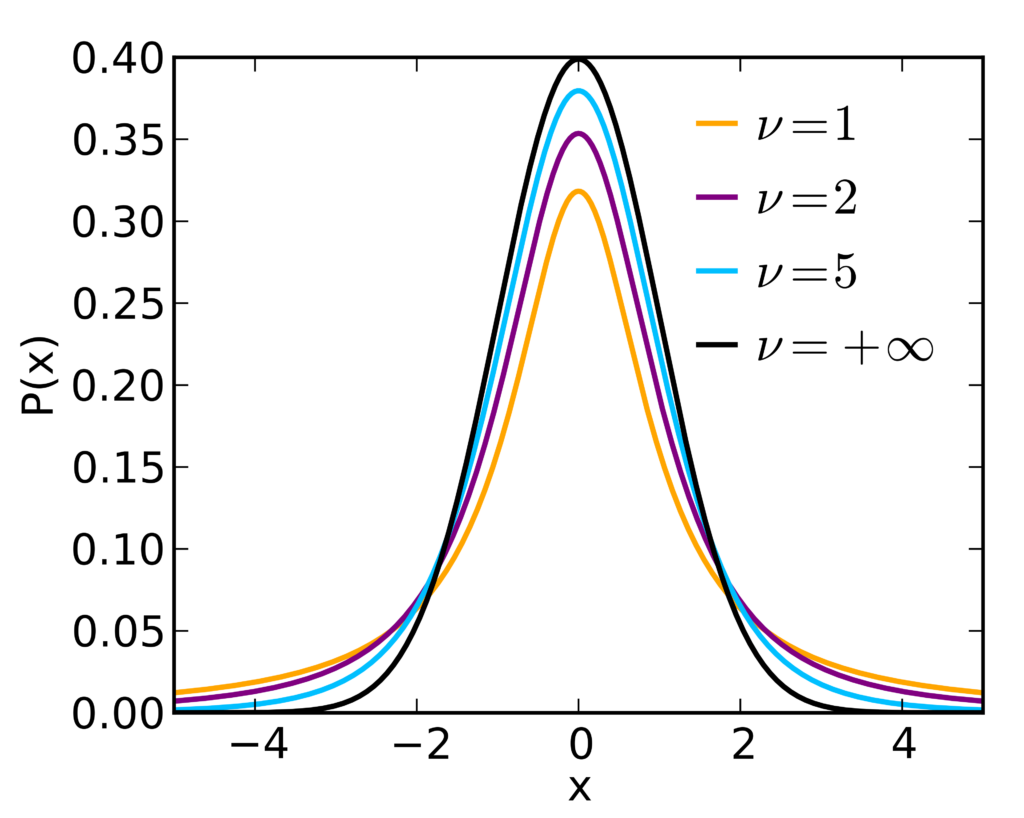
Quando é pequeno (temos menos amostras):
- a distribuição t tem caudas mais largas (maior dispersão).
- os valores extremos são relativamente mais prováveis.
- os intervalos de confiança para determinado nível de confiança são maiores.
- os intervalos de abrangência ficam mais amplos.
Quando aumenta (temos mais amostras):
- a distribuição t vai ficando mais “estreita” no centro e as caudas vão diminuindo (menor dispersão).
- os valores extremos são relativamente menos prováveis.
- os intervalos de confiança para determinado nível de confiança são menores.
- a distribuição se aproxima da distribuição normal padrão.
No limite, quando aproxima um valor infinito, a distribuição aproxima a distribuição normal padrão .
A fórmula que define a distribuição de probabilidade t de Student com graus de liberdade é:
onde é a função gama. Em particular, para sendo um número inteiro maior que 1, temos que
onde quando é par, quando é impar e .
No entanto, quando trabalhamos com a distribuição t de Student, não utilizamos a fórmula da distribuição em nossos cálculos. Normalmente, usamos como referência uma tabela da distribuição t, ou tabela t:
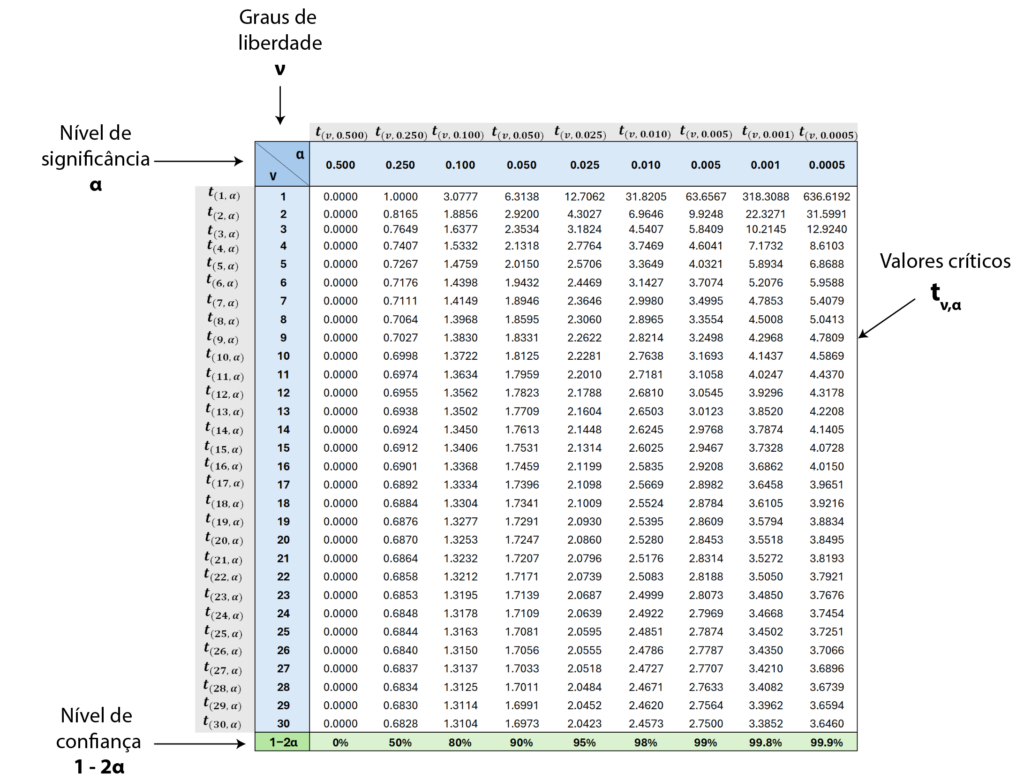
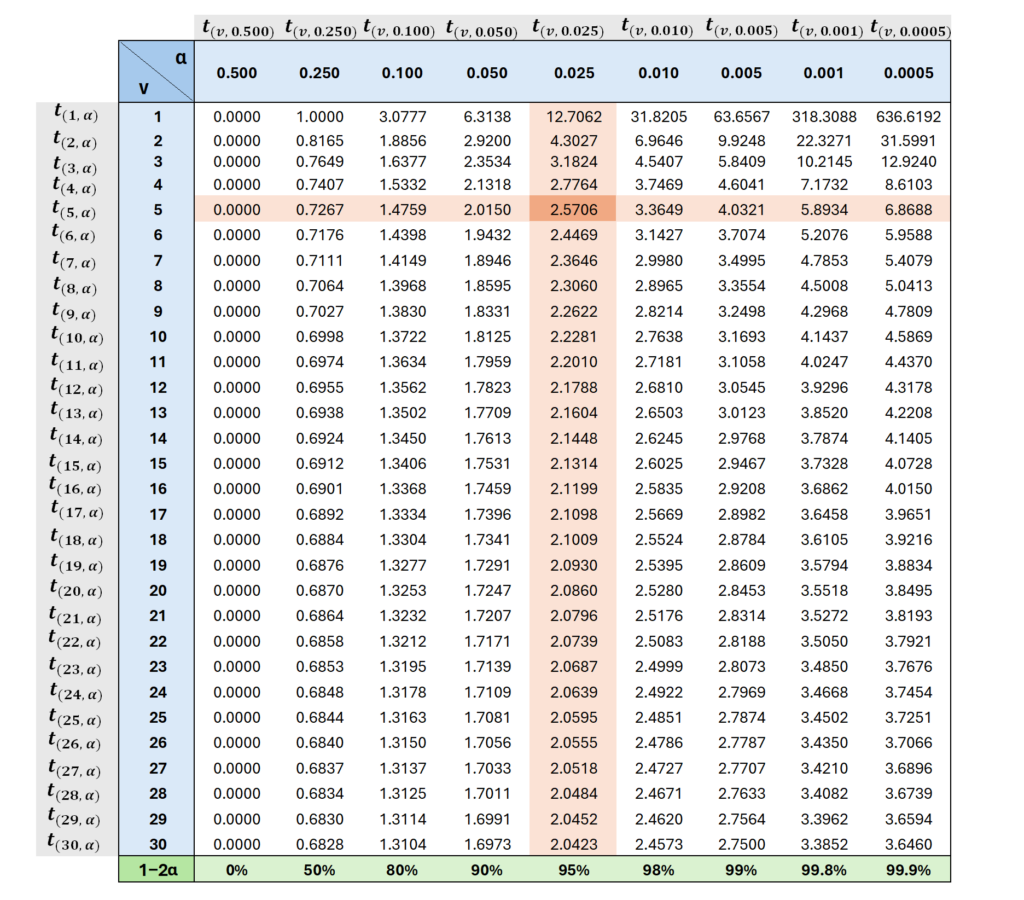
A tabela da distribuição t de Student indica os valores críticos correspondentes ao grau de liberdade e ao nível de significância para determinados valores de e .
Para descobrirmos o valor crítico de , por exemplo, que corresponde ao valor crítico do nível de confiança de 95% com 5 graus de liberdade, devemos olhar na fileira indicada pelo número 5 e na coluna indicada pelo grau de confiança 95% ou pelo nível de significância 0,025. O valor de estará no cruzamento dessa fileira e coluna. No exemplo, esse valor é de 2,5706, como indicado na imagem abaixo:
Essa tabela possui função similar à da tabela z, porém possui diferenças importantes.
Primeiro, ela possui o parâmetro adicional . Além disso, ao contrário da tabela , os valores dentro da tabela não indicam probabilidades, mas sim o valor crítico correspondente ao nível de significância e graus de liberdade selecionados.
Em algumas tabelas t, podemos encontrar o nível de confiança correspondente ao nível de significância na parte inferior da tabela, ou logo acima do nível de significância.
Algumas observações sobre a tabela da distribuição t:
- Para um mesmo número de graus de liberdade, conforme diminuímos o nível de significância (ou seja, aumentamos o nível de confiança), maior será o valor crítico .
Isso significa que para aumentar o nosso nível de confiança no resultado de uma medição, precisamos aumentarmos o tamanho do intervalo de confiança e assim a amplitude de resultados possíveis. - Para um mesmo nível de significância (mesmo nível de confiança), conforme aumentamos o valor dos graus de liberdade (ou seja, aumentamos o número de amostras), menor será o valor crítico .
Isso significa que ao realizarmos mais amostras, podemos reduzir o tamanho do intervalo de confiança e assim reduzir a amplitude de resultados possíveis para um mesmo nível de confiança. - Para qualquer grau de liberdade , o valor de é sempre maior que o valor de . Isso confirma o fato de que variáveis com distribuições t sempre possuem maior dispersão que variáveis com distribuição normal padrão. Ou seja, para um mesmo nível de confiança, uma variável com distribuição t sempre vai requerer um intervalo de de confiança maior do que uma variável normal padrão.
No entanto, para um número alto de graus de liberdade (por exemplo maior que 30), o valor de tende a ficar muito próximo de , e por isso em alguns casos podemos considerar que a variável possui distribuição normal padrão ao invés da distribuição t de Student e usar o valor para construir o intervalo de confiança.
Utilizamos a distribuição t de Student nas seguintes situações:
- Quando realizamos amostras de uma variável com distribuição normal (gaussiana) e queremos modelar o a distribuição do desvio da média amostral para a média real da variável, porém não conhecemos o desvio-padrão da distribuição original e o número de amostras é pequeno.
Na teoria, independentemente do número de amostras, se não soubermos o desvio-padrão real da distribuição e utilizarmos o desvio-padrão amostral , a distribuição t de Student é mais adequada. No entanto, para um número de observações acima de 30 ou 50, é comum considerarmos o desvio da variável amostrada como tendo distribuição normal.
Exemplo – Etapa 3
Voltando ao nosso exemplo da medição do volume do balão de 2 litros, devemos definir o tipo de avaliação (A ou B) de incerteza de medição utilizada para cada uma das grandezas de entrada, além de calcular os valores (estimativas) de cada uma das grandezas.
Caso a avaliação seja do Tipo B, devemos também definir a distribuição que será utilizada, usando nossa experiência, uma especificação técnica, certificado de calibração, uma norma, ou alguma justificativa técnica plausível.
Em todos os cálculos, utilizaremos os valores de condição ambiente abaixo, obtidos experimentalmente e através do histórico de medições ambiente do local onde as medições foram realizadas:
- Temperatura ambiente:
- Pressão atmosférica:
- Umidade relativa:
Abaixo listamos as grandezas de entrada, o tipo de avaliação utilizada para determinar a incerteza de medição, e os valores obtidos experimentalmente, a partir do conhecimento técnico prévio ou normas.
Massa M̄
- O que é → Média das massas da água em 5 enchimentos repetidos
- Tipo de avaliação → Tipo A com número de amostras
- Distribuição → Normal (porém, o desvio da média segue distribuição t de Student com 4 graus de liberdade)
Realizamos as medições de 5 enchimentos repetidos em condições padrão. Os valores obtidos () foram: 1992 g, 1993 g, 1990 g, 1996 g, 1994 g
Média:
Correção ΔMcal
- O que é → Correção da calibração da balança padrão
- Tipo de avaliação → Tipo B
- Distribuição → Distribuição normal – baseada no certificado de calibração da balança
De acordo com o certificado de calibração da balança, o desvio é .
Correção ΔMres
- O que é → Correção da resolução da balança padrão
- Tipo de avaliação → Tipo B
- Distribuição → Retangular – estimativa conservadora – baseada na resolução do display da balança (balança digital)
A resolução da balança, verificada em suas especificações e em seu display, é .
A resolução irá adicionar um componente de incerteza de medição, porém não haverá um valor de correção da medição associado à resolução.
Isso é,
Empuxo do ar Ear
- O que é → Correção do empuxo do ar
- Tipo de avaliação → Tipo B
- Distribuição → Retangular – estimativa conservadora
O empuxo do ar é calculado através do método mencionado na Etapa 1 e considerando as condições ambiente mencionadas anteriormente.
O resultado valor calculado da densidade do ar é .
Consideramos (experiência técnica) que a densidade do ar não deve variar mais do que %, portanto . Considerando esse valoro da densidade do ar e um volume de 2 litros, temos que
.
Densidade da água ρ
- O que é → Densidade da água bi-destilada na temperatura ambiente da medição (20 °C).
- Tipo de avaliação → Tipo B
- Distribuição → Retangular – estimativa conservadora
Considerando que e utilizando o método de cálculo descrito na Etapa 1, calculamos que
.
Mensurando: volume V
Com os valores das grandezas de entrada obtidos conforme acima, podemos estimar o volume do balão de acordo com a formula descrita na Etapa 1:
Usando os valores calculados, temos que
.
Resumo do mensurando e das grandezas de entrada: valores, tipo e distribuição
Com os dados obtidos até agora, podemos criar a seguinte tabela com o resumo das informações de cada grandeza:
| Grandeza | Valor (xᵢ) | Avaliação de Incerteza | Distribuição |
| Massa: M̄ | 1993,0 g | Tipo A | Normal |
| Correção da balança: ΔMcal | −0,2 g | Tipo B | Normal |
| Correção da resolução da balança: ΔMres | 0,0 g | Tipo B | Retangular |
| Empuxo do ar: Ear | 2,4 g | Tipo B | Retangular |
| Densidade da água: ρ | 998,2 g/L | Tipo B | Retangular |
| Volume: V | 1,9988 L | —– | —– |
Etapa 4: Incertezas-Padrão das Grandezas de Entrada
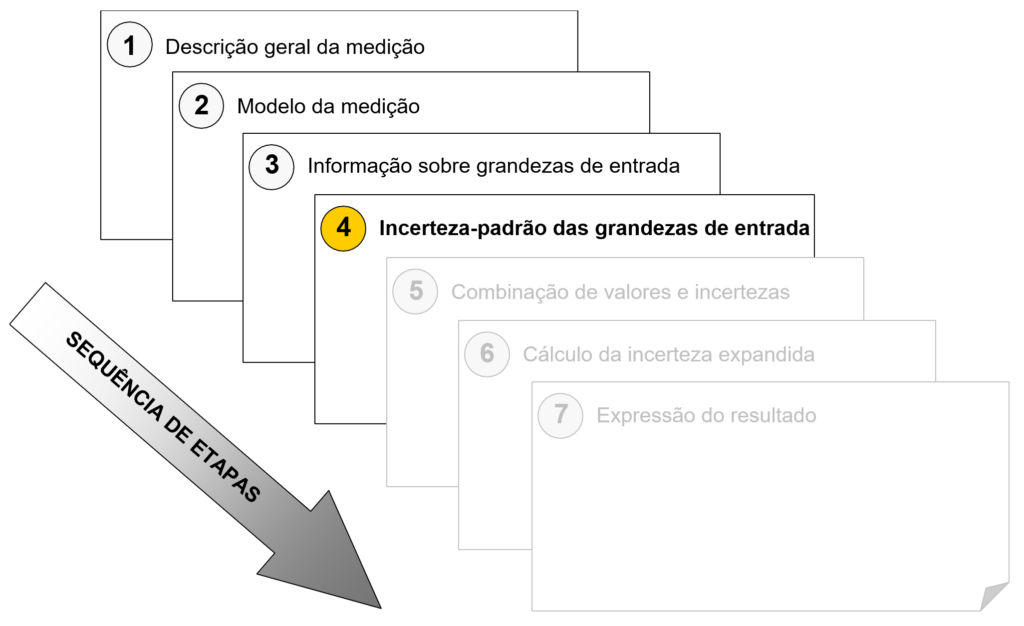
Nessa etapa, devemos calcular o desvio-padrão de cada uma das grandezas de entrada .
Para a avaliação Tipo A, a incerteza-padrão é o desvio-padrão da média das amostras.
Para a avaliação Tipo B, a incerteza-padrão também é o desvio-padrão, mas nesse caso ele não é calculado experimentalmente, mas sim a partir da distribuição de probabilidade assumida. Abaixo explicaremos como a incerteza-padrão é calculada para os principais tipos de distribuição utilizados.
Distribuição normal ou t de Student
No caso de uma grandeza com distribuição normal ou t de Student obtida através de uma avaliação do Tipo B, normalmente o valor da incerteza-padrão será obtida através de um certificado de calibração.
No certificado, a incerteza de medição indicada será normalmente a incerteza de medição expandida , sobre a qual iremos falar mais na Etapa 7.
Nesse momento, basta saber que a incerteza de medição expandida é reportada em conjunto com um fator de abrangência .
No caso de uma distribuição normal padrão, corresponde ao valor de para determinado nível de confiança utilizado no certificado. No caso de uma distribuição t, corresponde ao valor de para determinado nível de confiança e graus de liberdade da grandeza.
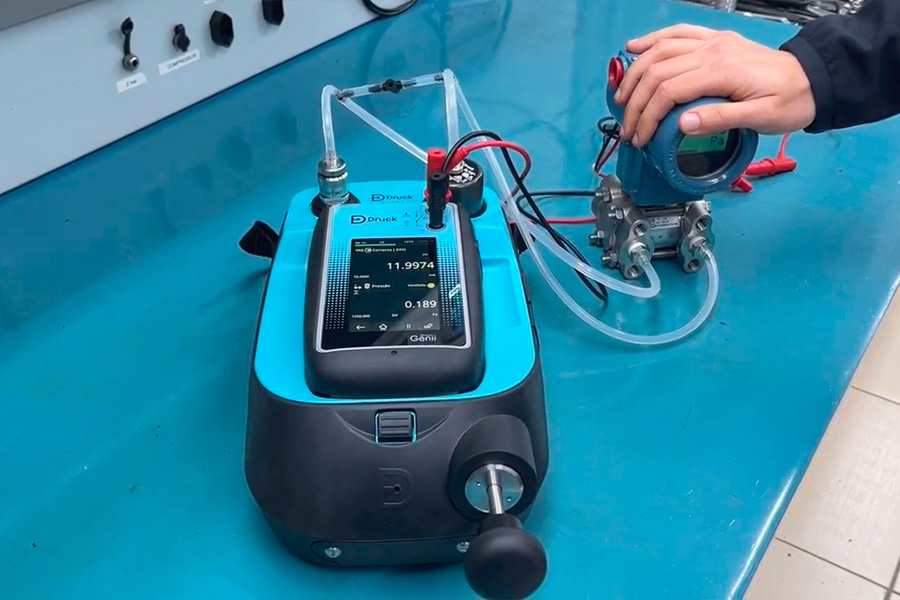
Um exemplo de como essas informações são reportadas no certificado de medição:
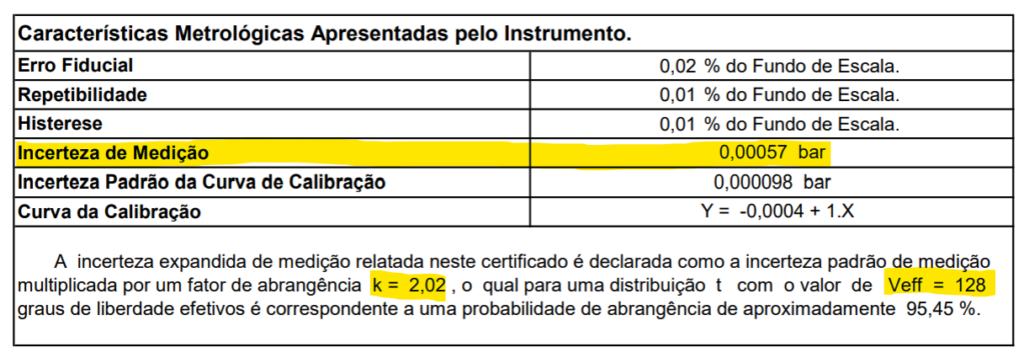
Em ambos os casos, para obtermos o valor da incerteza-padrão , basta dividirmos a incerteza de medição expandida pelo fator de abrangência:
.
Por exemplo, na imagem acima, podemos ver que a incerteza de medição (incerteza de medição expandida) reportada no certificado é igual a 0,00057 bar, e temos k = 2,02. Nesse caso, o valor da incerteza-padrão é igual a .
Distribuição retangular (uniforme)
No caso de uma distribuição retangular (uniforme) limitada entre os pontos e , temos que a dispersão ou amplitude δx da grandeza é .
O valor da incerteza-padrão de uma grandeza com distribuição uniforme corresponde ao desvio-padrão da distribuição. Podemos calcular que o valor do desvio padrão é igual a
Ou seja, a incerteza-padrão é igual a amplitude da distribuição dividida pela raiz de 12.
Por exemplo, vemos considerar um multímetro com resolução de medição de tensão 0,1 volts.
Assumindo que a incerteza associada à resolução do multímetro é distribuída de forma uniforme, a amplitude dessa distribuição é simplesmente o valor da resolução. Por conta disso, a incerteza-padrão associada à essa grandeza é .
Vamos considerar outro exemplo: suponhamos que temos uma grandeza cujo valor estimamos em . Se assumirmos que essa grandeza possui distribuição retangular, então o valor da dispersão é 2 vezes , visto que a grandeza está limitada entre os valores e , e portanto .
Nesse caso, a incerteza-padrão é igual a .
Distribuição triangular simétrica
No caso de uma distribuição triangular simétrica limitada entre os pontos e , temos que a dispersão ou amplitude δx da grandeza é .
O valor da incerteza-padrão de uma grandeza com distribuição triangular simétrica corresponde ao desvio-padrão da distribuição. Podemos calcular que o valor do desvio padrão é igual a
É interessante notarmos que uma grandeza com distribuição retangular limitada entre os pontos e possui uma incerteza-padrão maior do que a de uma grandeza com distribuição triangular simétrica entre os mesmos dois pontos por um fator de .
Ou seja, para uma mesma grandeza do Tipo B, assumir uma distribuição retangular resulta em uma incerteza-padrão aproximadamente 41% maior do que uma distribuição triangular simétrica.
Isso confirma nossa intuição de que considerarmos uma distribuição retangular implica uma estimativa mais conservadora do que assumirmos uma distribuição triangular.
Resumo da Incerteza-Padrão para Diferentes Distribuições
| Tipo de Avaliação | Distribuição | Caracterização da Distribuição | Dispersão | Incerteza-Padrão |
|---|---|---|---|---|
| Tipo A | Normal | amostras | Desvio-padrão amostral: | |
| Tipo B | Normal | Certificado de calibração com incerteza expandida e fator de abrangência | Incerteza expandida | |
| Tipo B | Retangular (Uniforme) | Limites e , amplitude ou semi-amplitude | Amplitude | |
| Tipo B | Triangular Simétrica | Limites e , amplitude ou semi-amplitude | Amplitude |
Exemplo – Etapa 4
Voltando ao nosso exemplo do balão volumétrico, podemos analisar cada grandeza de entrada para identificar o valor de sua dispersão e calcular a sua incerteza-padrão.
No caso da média das medições da massa (incerteza do Tipo A), temos que a incerteza-padrão é equivalente ao desvio-padrão da média.
Lembrando que as medições da massa () foram 1992 g, 1993 g, 1990 g, 1996 g, 1994 g, podemos calcular
A partir desse valor, podemos calcular que a incerteza-padrão é
No caso da correção da calibração da balança, verificamos pelo certificado de calibração do equipamento que sua incerteza de medição expandida é igual a 1,2 g com fator de abrangência (100 graus de liberdade). Logo,
0,6 g.
Para a resolução da balança, consideramos que a dispersão é o valor da resolução (1,0 g) então o valor da incerteza de medição é (considerando uma distribuição retangular)
0,29 g.
Para os valores do empuxo do ar e a densidade da água, assumimos distribuições retangulares cujos limites foram definidos de acordo com nossos cálculos ou experiência. Para o empuxo do ar temos que
0,06 g
e para a densidade da água temos
0,023 g / L.
A tabela abaixo resume as informações das grandezas de entrada obtidas até agora, incluindo a incerteza-padrão:
| Grandeza | Valor (xᵢ) | Avaliação | Distribuição | Dispersão δxᵢ | Incerteza-Padrão u(xᵢ) |
| Massa: M̄ | 1993,0 g | Tipo A | Normal | 2,2361 g (desvio-padrão) | 1,0 g (desvio padrão da média) |
| Correção da balança: ΔMcal | −0,2 g | Tipo B | Normal | 1,2 g (k=2,02) (incerteza expandida) | 0,60 g |
| Correção da resolução da balança: ΔMres | 0,0 g | Tipo B | Retangular | 1,0 g (resolução) | 0,29 g |
| Empuxo do ar: Ear | 2,4 g | Tipo B | Retangular | ±0,1 g = 0,2 g (limites) | 0,06 g |
| Densidade da água: ρ | 998,2 g/L | Tipo B | Retangular | ±0,4 g/L = 0,8 g/L (limites) | 0,023 g/L |
| Volume: V | 1,9988 L | —– | —– | —– | —– |
Etapa 5: Combinação de Valores e Componentes da Incerteza de Medição
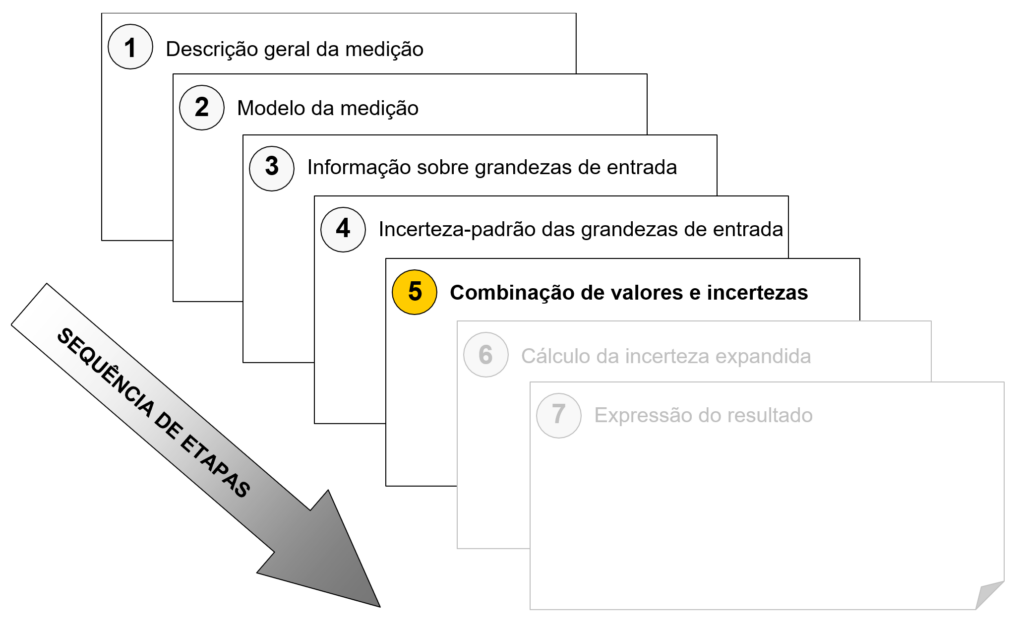
Com todos os componentes da incerteza de medição das grandezas de entrada expressos como incertezas-padrão, eles são combinados por meio da lei de propagação de incertezas.
Grandezas Não Correlacionadas
Para grandezas de entrada independentes e não correlacionadas a incerteza de medição combinada da estimativa do mensurando é calculada de acordo com a seguinte fórmula:
GUM Eq. (10): Incerteza de medição combinada
onde são os coeficientes de sensibilidade e são os as incertezas-padrão das grandezas de entrada.
Os coeficientes de sensibilidade são calculados iguais às derivadas parciais do modelo matemático em relação a cada grandeza de entrada. Eles indicam o quanto o mensurando é afetado por variações em cada grandeza de entrada.
O valor é conhecido como a contribuição de incerteza da grandeza de entrada sobre o mensurando . O seu valor reflete o quanto essa grandeza influencia a incerteza de medição combinada do mensurando .
Podemos também transformar a contribuição de incerteza de medição em uma porcentagem para obtermos o peso relativo da contribuição de incerteza de medição de cada grandeza de entrada na variância (incerteza de medição ao quadrado).
Esse valor é chamado de índice ou percentual de contribuição de variância e é calculado através da seguinte fórmula:
Índice de contribuição de incerteza de medição
Ao calcularmos o índice de contribuição de incerteza de medição para cada grandeza de entrada, podemos criar uma planilha de incerteza de medição, também conhecida como orçamento de incerteza de medição ou balanço de incertezas (uncertainty budget) listando a contribuição porcentual de incerteza de cada grandeza.
Isso nos permite entender quais grandezas possuem maior influência no resultado final da incerteza de medição e assim identificar quais pontos do nosso processo podemos melhorar para termos um maior efeito na redução da incerteza de medição.
Grandezas Correlacionadas
Para grandezas de entrada correlacionadas, a fórmula da incerteza de medição combinada leva em consideração o coeficiente de correlação estimado entre cada grandeza de entrada.
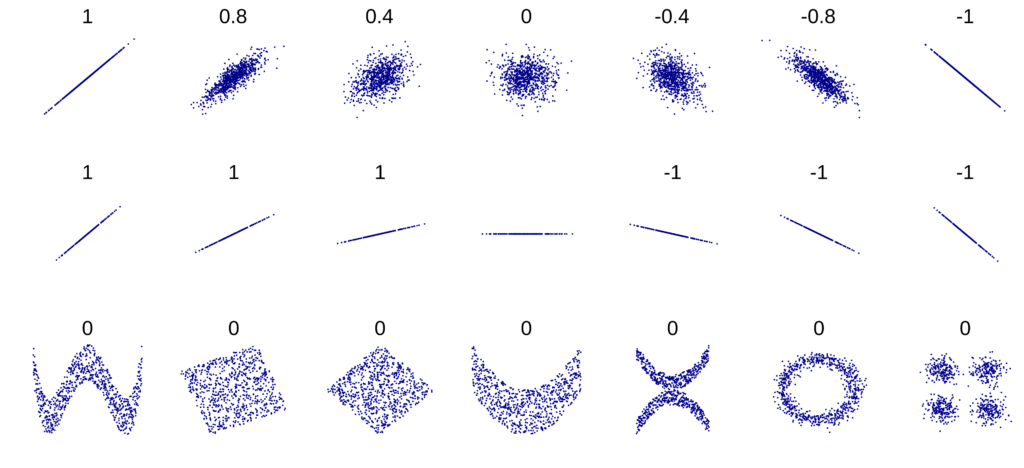
O coeficiente de correlação entre duas grandezas e possui valores entre -1 e 1 e indica o quanto elas tendem a variar em conjunto de forma linear.
Se o coeficiente de correlação é igual a 1, então as variáveis tendem a variar em conjunto: quando uma delas aumenta, a outra variável tende a aumentar.
Se o coeficiente é igual a -1, então as variáveis tendem a variar de forma inversa: quando uma delas aumenta, a outra tende diminuir.
Finalmente, se o coeficiente é igual a 0, não há correlação linear entre as variáveis. Valores entre -1 e 0 ou 0 e 1 indicam correlação inversa ou direta, mas com maior variabilidade ou “ruído” na variação do que quando o coeficiente é -1 ou 1.
No caso de grandezas de entrada correlacionadas, a fórmula da incerteza de medição combinada se torna:
GUM Eq. (13): Incerteza de medição combinada para grandezas de entrada correlacionadas
Ou seja, a fórmula adiciona um fator de que irá depender do grau de correlação entre pares de grandezas de entrada, de seus coeficientes de sensibilidade e incertezas-padrão.
Isso não quer dizer que a incerteza de medição combinada se tornará maior do que no caso de grandezas não correlacionadas. Se o índice de correlação for negativo, é possível que as contribuições de incerteza de medição anulem umas às outras, reduzindo a incerteza de medição combinada.
No caso de grandezas correlacionadas, a contribuição de incerteza de medição da grandeza de entrada se torna
.
Caso as grandezas de entrada não sejam correlacionadas, o valor do coeficiente de correlação é zero para todas as grandezas e , e portanto, a fórmula acima se torna a fórmula simplificada indicada anteriormente.
Exemplo – Etapa 5
Continuando nosso exemplo da medição do volume de um balão volumétrico, primeiramente calculamos o coeficiente de sensibilidade de cada uma das grandezas. Lembrando que nosso modelo matemático é
podemos calcular que para as grandezas que entram somadas no numerador (M̄, ΔMcal, ΔMres, Ear), o coeficiente de sensibilidade é
≈ 0,001001 L/g.
Para a densidade da água,
≈ −0,002001 L²/g.
Assumindo que as grandezas de entrada não são correlacionadas, podemos calcular que
v
A planilha de incerteza de medição, com todos os componentes, suas contribuições e os respectivos índices de contribuição é mostrado abaixo:
| Grandeza | Valor (xᵢ) | Avaliação | Distribuição | Dispersão (δxᵢ) | Incerteza-Padrão u(xᵢ) | Coef. de Sensib. cᵢ | Contrib. cᵢ·u(xᵢ) | Índice I(xᵢ) (cᵢ·u(xᵢ)/uc)² |
| Massa: M̄ | 1993,0 g | Tipo A | Normal | 2,2361 g (desvio-padrão) | 1,0 g | 0,001001 L/g | 0,001001 L | 60,2% |
| Correção da balança: ΔMcal | −0,2 g | Tipo B | Normal | 1,2 g (k=2,02) (incerteza de medição expandida) | 0,60 g | 0,001001 L/g | 0,000601 L | 21,7% |
| Correção da resolução da balança: ΔMres | 0,0 g | Tipo B | Retangular | 1,0 g (resolução) | 0,29 g | 0,001001 L/g | 0,000290 L | 5,1% |
| Empuxo do ar: Ear | 2,4 g | Tipo B | Retangular | ±0,1 g = 0,2 g (limites) | 0,06 g | 0,001001 L/g | 0,000060 L | 0,2% |
| Densidade da água: ρ | 998,2 g/L | Tipo B | Retangular | ±0,4 g/L = 0,8 g/L (limites) | 0,023 g/L | 0,002001 L²/g | 0,000460 L | 12,8% |
| Volume: V | 1,9988 L | —– | —– | —– | uc (v) = 0,00129 L | —– | —– | 100% |
Portanto, a incerteza-padrão combinada do volume é uc(v) = 0,00129 L.
Observando o índice de variância, a maior contribuição é da repetibilidade das pesagens (60,2%), seguida da calibração da balança (21,7%). Essas são as grandezas prioritárias para eventuais melhorias no processo e redução da incerteza de medição.
Por exemplo, para reduzirmos a incerteza de medição do volume, uma das ações mais efetivas seria aumentarmos o número de amostras de pesagens.
Como as pesagens possuem mais da metade (60,2%) de contribuição na incerteza de medição combinada, ao aumentarmos o número de amostras de pesagens, o valor da incerteza de medição associada ao peso médio irá ser reduzido a uma proporção de , presumindo que o desvio-padrão das amostras se mantenha aproximadamente igual, o que é uma suposição aceitável.
De acordo com o orçamento de incerteza de medição, outra forma efetiva de reduzirmos a incerteza de medição combinada é reduzindo a incerteza-padrão da balança , que contribui com aproximadamente 21,7% da incerteza de medição combinada.
Isso pode ser feito utilizando uma balança padrão com melhor desempenho, ou realizando uma nova calibração da balança que consiga reduzir a incerteza de medição expandida da balança (por exemplo, utilizando um padrão melhor, aumentando o número de amostras, ou através de outros métodos).
Etapa 6: Incerteza de Medição Expandida
Nessa etapa, a incerteza-padrão combinada é multiplicada por um fator de abrangência k para obter a incerteza de medição expandida U, que define um intervalo com maior probabilidade de conter o valor verdadeiro do mensurando:
GUM Eq. (18): Incerteza de medição expandida
O fator k é determinado pela distribuição de probabilidade do mensurando e pelo nível de confiança desejado.
Quando a distribuição resultante da estimativa do mensurando é obtida através de um número de amostras muito grande, podemos considerar que a distribuição é aproximadamente normal (teorema do limite central), o valor de k corresponderá a um nível crítico do nível de confiança , como explicamos na etapa 3.
Considerando uma distribuição normal padrão, alguns valores comuns de k são:
- : nível de confiança de ~68% para distribuição normal
- : nível de confiança de 90% para distribuição normal
- : nível de confiança de 95% para distribuição normal
- : nível de confiança de ~95,45% para distribuição normal
- : nível de confiança de 99% para distribuição normal
- : nível de confiança de ~99,73% para distribuição normal
No entanto, normalmente consideramos que a distribuição da estimativa do mensurando segue uma distribuição t de Student, o que implica fatores de abrangência k maiores para um mesmo nível de confiança. Mas no caso do mensurando, qual é o número grau de graus de liberdade que devemos utilizar?
Para múltiplos componentes de incerteza de medição, os graus de liberdade efetivos da estimativa do mensurando são calculados pela equação de Welch-Satterthwaite:
GUM Apêndice G – Equação G.2b: Graus de liberdade efetivos através da equação de Welch-Satterthwaite
onde corresponde ao número de graus de liberdade da grandeza e é o índice de contribuição de incerteza da grandeza , como já explicado anteriormente.
Para grandezas do Tipo A, o valor de será simplesmente o número de amostras menos 1 (, como já mencionado na seção sobre a distribuição t.
Para grandezas do Tipo B, existem 2 possibilidades:
- Se a grandeza for obtida através de um certificado de calibração, utilize o número de graus de liberdade reportados no certificado.
- Se a grandeza for modelada por experiência, estimativas de limites de dispersão ou especificações técnicas, utilizando uma distribuição retangular, triangular ou similar, considere que a grandeza possui graus de liberdade infinito. Isso fará com que essa grandeza não tenha influência no cálculo de , pois o fator será 0.
A equação de Welch-Satterthwaitepode resultar em um número não-inteiro (com parte decimal). Normalmente, arredondamos o resultado para baixo (ignoramos a parte decimal) para obter um número inteiro de graus de liberdade efetivos.
Exemplo – Etapa 6
No exemplo do balão volumétrico, podemos verificar que apenas a média das pesagens e a correção da calibração da balança terão influência no número de graus de liberdade, pois as outras grandezas de entrada possuem graus de liberdade infinito.
Utilizando a fórmula de Welch-Satterthwaite, temos que
Como devemos arredondar o resultado para baixo para obter um número interior, temos que .
Considerando um nível de confiança de 95,45% ( valor normalmente utilizado na maior parte das calibrações), podemos verificar que .
A partir desse valor, podemos calcular a incerteza de medição expandida da estimativa do volume do balão:
mL.
A tabela abaixo mostra a planilha de incerteza de medição expandida, que inclui os graus de liberdade de cada grandeza, os graus de liberdade efetivo e a incerteza de medição expandida:
| Grandeza | Valor (xᵢ) | Avaliação | Distrib. | Dispersão (δxᵢ) | Incerteza-Padrão u(xᵢ) | Coef. de Sensib. cᵢ | Contrib. cᵢ·u(xᵢ) | Índice I(xᵢ) (cᵢ·u(xᵢ)/uc)² | Graus de liberdade vᵢ |
| Massa: M̄ | 1993,0 g | Tipo A | Normal | 2,2361 g | 1,0 g | 0,001001 L/g | 0,001001 L | 60,2% | 4 |
| Correção da balança: ΔMcal | −0,2 g | Tipo B | Normal | 1,2 g (k=2,02) | 0,60 g | 0,001001 L/g | 0,000601 L | 21,7% | 100 |
| Correção da resolução da balança: ΔMres | 0,0 g | Tipo B | Retangular | 1,0 g | 0,29 g | 0,001001 L/g | 0,000290 L | 5,1% | infinitos |
| Empuxo do ar: Ear | 2,4 g | Tipo B | Retangular | 0,2 g | 0,06 g | 0,001001 L/g | 0,000060 L | 0,2% | infinitos |
| Densidade da água: ρ | 998,2 g/L | Tipo B | Retangular | 0,8 g/L | 0,023 g/L | 0,002001 L²/g | 0,000460 L | 12,8% | infinitos |
| Volume: V | 1,9988 L | —– | —– | —– | uc (v) = 1,29 mL | —– | —– | 100% | 10 |
| —– | —– | —– | —– | p = 95,45% k = 2,28 | U = 2,94 mL | —– | —– | —– | —– |
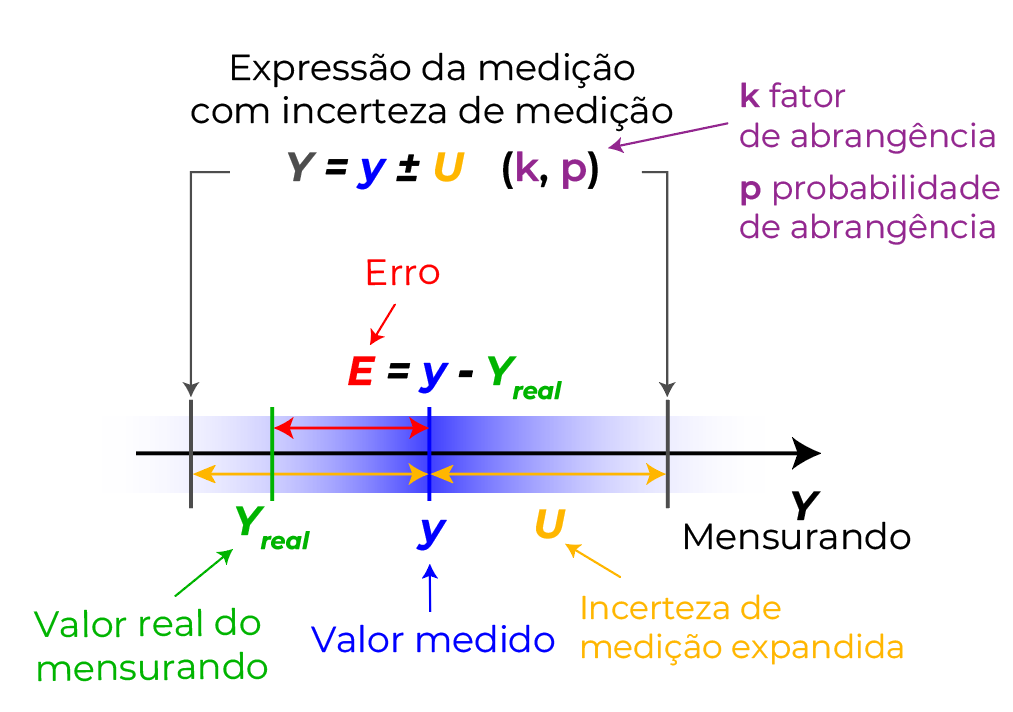
Etapa 7: Expressão do Resultado
O resultado final de uma medição deve sempre ser expresso de forma completa, necessariamente incluindo:
- O melhor estimado do mensurando (y)
- A incerteza de medição expandida (U)
- O fator de abrangência (k) utilizado
- O nível de confiança utilizado (p ou 1 – 2)
É recomendado também incluirmos as seguintes informações, sempre que possível.
- A distribuição utilizada (normal ou t)
- Os graus de liberdade efetivos calculados, se estivermos utilizando uma distribuição normal
O resultado é reportado da seguinte forma:
Expressão do resultado de uma medição conforme GUM 7.2.3
onde e são números positivos que correspondem aos parâmetros e . é normalmente expresso como uma porcentagem (por exemplo, 95% ao invés de 0,95).
Se incluirmos os graus de liberdade, o resultado é expresso da seguinte forma:
É importante pontuar que:
- As unidades de e devem ser incluídas. As unidades podem ser diferentes, porém isso deve ficar claro no resultado. Por exemplo:
mm
m mm
são duas formas aceitáveis de reportar o mesmo resultado de medição.
- Devemos nos atentar para o número de algarismos significativos do resultado. Não devemos fornecer um número excessivo de algarismos, e os valores do mensurando e de sua incerteza de medição expandida devem ter o mesmo número de algarismos significativos.
- A incerteza de medição pode ser expressa como uma incerteza de medição relativa. Nesse caso, dividimos o valor da incerteza de medição expandida pelo valor absoluto da estimativa do mensurando e obtemos a incerteza de medição relativa (), que é reportada como uma porcentagem:
Por exemplo, se mm e mm como nos exemplos acima, temos que %, portanto,
mm % .

Exemplo – Etapa 7
Para o exemplo de calibração do volume, podemos reportar o resultado da medição da seguinte forma:
V = (1,9988 ± 0,0029) L (k = 2,28; p = 95,45%; νeff = 10)
Esta notação significa que, com base no nosso modelo e medições, há 95,45% de probabilidade do volume do balão volumétrico estar entre 1,9959 L e 2,0017 L.
Utilizando unidades de mililitros, o resultado se torna:
V = 1998,8 ± 2,9 mL (k = 2,28; p = 95,45%; νeff = 10)
Utilizando a incerteza de medição relativa, o resultado é:
V = 1998,8 mL U = 0,15% (k = 2,28; p = 95,45%; νeff = 10)
Esses resultados são a base para o certificado de calibração emitido pelo laboratório. Com esse resultado em mãos, podemos avaliar se a incerteza de medição obtida está dentro dos nossos requisitos e do que seria esperado para o método e instrumentos de medição utilizados.
Caso o resultado apresente uma incerteza de medição maior do que a desejada, podemos avaliar o balanço de incertezas para identificar qual a maior fonte de incerteza de medição, e caso necessário, realizar uma modificação no nosso método ou instrumentos para melhoramos o resultado final da medição.
Demonstração Interativa
Neste link temos uma demonstração interativa do cálculo da incerteza de medição do exemplo do balão volumétrico utilizado ao longo desse artigo.
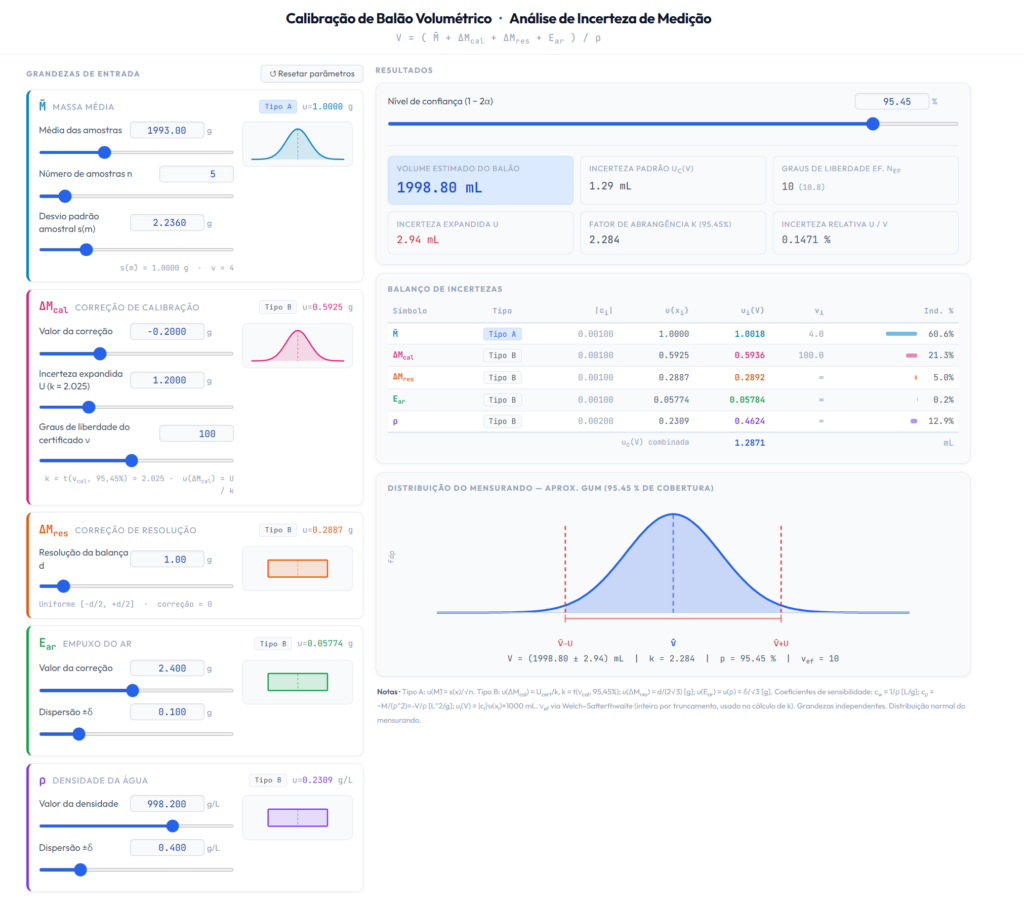
Na demonstração, é possível modificar os parâmetros das grandezas de entrada (valores, dispersão) assim como o nível de confiança do resultado final.
Conforme os parâmetros são modificados, a demonstração automaticamente calcula a estimativa do volume e a incerteza de medição expandida, assim como reporta o orçamento de incerteza de medição.
Através da demonstração, é possível entendermos como cada um dos parâmetros afeta a estimativa do volume do balão e a incerteza de medição expandida calculada. O balanço ou planilha de incerteza de medição nos permite ver quais grandezas possuem maior influência na incerteza de medição, e como o balanço é afetado através de intervenções nas grandezas de entrada.
Importância do Cálculo da Incerteza de Medição na Garantia da Qualidade
O cálculo e a correta expressão da incerteza de medição têm impacto direto em diversas áreas:
- Decisões informadas: Ao conhecer a incerteza de medição, é possível avaliar se um instrumento ou processo atende às especificações — por exemplo, verificar se uma peça fabricada respeita a tolerância dimensional especificada.
- Conformidade com normas: Normas como a ISO/IEC 17025 (acreditação de laboratórios) e a ISO 9001 (gestão da qualidade) exigem a incerteza de medição seja calculada e declarada nos certificados.
- Comparabilidade internacional: O GUM garante que medições realizadas em diferentes países ou laboratórios possam ser comparadas de forma válida, facilitando o comércio e a cooperação científica.
- Melhoria contínua: O orçamento de incerteza de medição identifica as fontes com maior contribuição, orientando ações de melhoria nos processos de medição.
- Confiança do cliente: Organizações que declaram cada incerteza de medição com transparência demonstram competência técnica e constroem credibilidade no mercado.
Limitações e cuidados práticos
Embora o método analítico do GUM seja extremamente útil e amplamente adotado, ele possui limitações.
A determinação de intervalos de abrangência pelo método analítico pode encontrar dificuldades quando:
- O modelo matemático é fortemente não linear.
- Quando há contribuições dominantes de grandezas com distribuição não gaussianas.
- Quando há assimetria significativa nas distribuições das grandezas entrada.
- Quando a distribuição do mensurando não é aproximadamente normal.
Nesses casos, métodos numéricos, como o método de Monte Carlo descrito no Suplemento 1 do GUM, podem ser mais apropriados para o cálculo da incerteza de medição.
Outro ponto importante é que a incerteza de medição não deve ser tratada como um número “decorativo” no certificado ou relatório. Ela precisa refletir realisticamente o processo de medição.
Uma incerteza de medição pequena, mas mal avaliada, pode ser mais perigosa do que uma incerteza de medição maior e corretamente estimada.
A própria apresentação do GUM traduzida pelo INMETRO chama atenção para isso em sua apresentação quando diz:
No mundo da experimentação e da medição, tão ou mais importante que conseguir uma incerteza pequena é buscar uma avaliação adequada e correta do mensurando e fazer uma correta expressão do resultado: menor incerteza não constitui necessariamente melhor medição. ↗
Ou seja, simplesmente obter uma menor incerteza de medição não significa necessariamente que realizamos uma medição melhor.
É essencial entendermos como essa incerteza de medição foi obtida, e avaliarmos se o método utilizado e a expressão do resultado estão corretas.
Conclusão
O ISO GUM fornece uma estrutura rigorosa e sistematizada para a avaliação e expressão da incerteza de medição. Ao seguir as 7 etapas – da descrição geral do processo à expressão final do resultado – é possível determinar com confiança o intervalo dentro do qual o valor verdadeiro do mensurando se encontra.
Seja no chão de fábrica, em laboratórios de calibração ou em centros de pesquisa, o domínio deste processo é fundamental para garantir a qualidade, rastreabilidade e confiabilidade das medições. O exemplo da calibração do balão volumétrico demonstra que, mesmo num processo aparentemente simples, múltiplas fontes de incerteza de medição precisam ser identificadas, quantificadas e combinadas adequadamente.
Dominar o GUM é uma exigência normativa. Porém, mais do que um requisito de norma, entender o que é incerteza de medição, como ela surge, como calculá-la e expressá-la, é uma competência essencial para qualquer profissional que trabalha com medições e deseja tomar decisões baseadas em dados confiáveis.
Referências
- Schmid, W.; Mieke, S.; Hoxha, M. — Main steps to the determination of measurement uncertainty according to GUM (Version 8/2015). EURAMET / PTB. ↗
- JCGM 100:2008 — Evaluation of measurement data — Guide to the Expression of Uncertainty in Measurement (GUM 2008). ↗
- INMETRO — Guia para a Expressão da Incerteza de Medição (GUM 2008), tradução para o português. ↗
- INMETRO — NIT-DICLA-021 Revisão 10: Expressão da incerteza de medição por laboratórios de calibração. ↗
- EURAMET — Calibration Guide 19 ↗
- Tanaka et. al. – Metrologia 38 (2001) p. 301 – 309 – Recommended table for the density of water between 0 °C and 40 °C based on recent experimental reports ↗